基于单片机的点阵式LED滚动汉字显示屏仿真设计
点阵式led组成的汉字显示屏在公共场所应用非常广泛。例如,车站发车时间提示、股票大厅中的股票价格显示板、商场的活动广告栏、候机厅的起飞时间表。点阵显示器的特点是可以按照需要的大小、形状和颜色进行组合,用单片机控制实行各种文字或图型的变化,达到广告宣传和提示的目的。
Proteus是一款新颖的嵌入式系统软硬件设计仿真平台,特别适用于单片机仿真,能够在线、实时仿真多种类型的单片机,诸如MCS-51系列单片机、PIC单片机、AVR单片机等,能够像硬件仿真器一样进行软硬件调试,而没必要花钱去购买和维护价格不菲的仿真器,对于初学单片机的人来说,既减少了学习成本,又达到了良好的学习效果。
2.硬件电路设计
点阵式LED滚动汉字显示屏硬件电路设计框图如图1所示。电路包括单片机、电源电路、时钟电路、复位电路、驱动电路和LED点阵电路等。本设计的核心是利用单片机读取显示字型码,通过驱动电路对16×16 LED点阵进行动态列扫描,以实现汉字的滚动显示。本设计选用的单片机为ATMEL公司的AT89C52,显示屏采用16×16 LED点阵。电源电路通过变压整流元件为单片机和其他电路提供稳定的+5V工作电压。时钟电路是单片机的驱动电路,复位电路可在需要时,手动使单片机程序计数器复位清零。通过阳极驱动电路向16×16点阵送字型码,本设计采用74LS273。通过阴极驱动电路对16×16点阵进行列扫描,本设计采用74HC138。
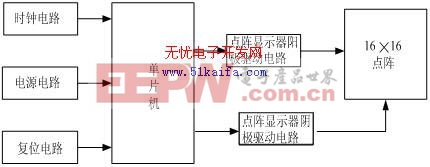
图1 硬件电路设计框图
利用Proteus软件设计点阵式LED滚动汉字显示屏硬件电路原理图如图2所示。在Proteus软件中,单片机模型本身包含了工作电源和可改变的工作频率,因此在仿真时无需设计电源电路和时钟电路。需要说明的是在Proteus软件目前版本中还没有16×16点阵模块,本设计中采用Proteus软件中现有的8×8点阵模块组合成一个16×16点阵模块。从图2中可以看出,16×16点阵的阳极驱动由P0口经输出缓冲器74LS273构成,在本设计中需要用两片,分别送出上8行和下8行的字型码。16×16点阵的阴极驱动由P2口经74HC138译码后动态扫描16×16点阵的各列,本设计中需要四片74HC138译码器,循环扫描各列,显示一个完整的汉字需要扫描32次。RP3为排阻,含有8个电阻,作P0口各位的上拉电阻,以保证P0口能够输出高电平。复位电路的作用是,在任何时刻可以手动复位单片机,使程序重新执行。
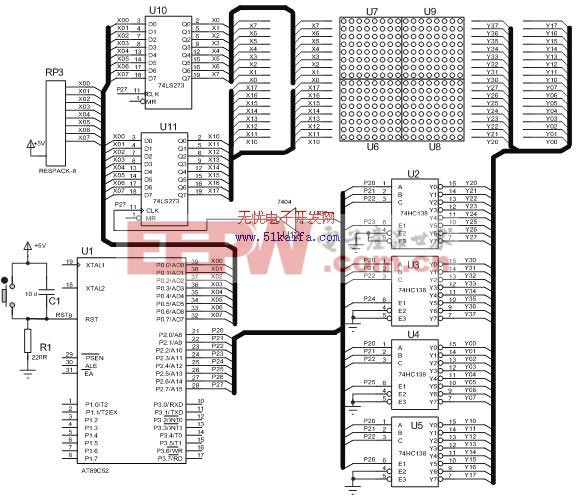
图2.硬件电路原理图
3. 软件设计
AT89C51单片机是8位机,每次只能送出8位数据,因此要向16×16点阵送出16行阳极驱动,需要送两次,或先送上8行,或先送下8行,为了能够实现每一列字型码的完整显示,采用74LS273进行锁存,否则会出现字型残缺现象。根据设计要求并结合图2的硬件连接进行程序设计,程序设计流程图如图3所示。
利用单片机C语言实现“2008北京欢迎您!”10个字的滚动显示,阿拉伯数字和标点符号按16×8点阵编码,汉字按16×16点阵编码, “2008北京欢迎您!”字型码表如下:
{0x00,0x00,0x0C,0x1C,0x10,0x24,0x10,0x24,0x10,0x44,0x10,0x84,0x0F,0x0E,0x00,0x00},
{0x00,0x00,0x07,0xF0,0x08,0x08,0x10,0x04,0x10,0x04,0x08,0x08,0x07,0xF0,0x00,0x00},
{0x00,0x00,0x07,0xF0,0x08,0x08,0x10,0x04,0x10,0x04,0x08,0x08,0x07,0xF0,0x00,0x00},
{0x00,0x00,0x0E,0x38,0x11,0x44,0x10,0x84,0x10,0x84,0x11,0x44,0x0E,0x38,0x00,0x00},
{0x00,0x00,0x0E,0x04,0x08,0x0C,0x08,0x0C,0x08,0x08,0x08,0x10,0xFF,0xFE,0x00,0x00},
{0x00,0x00,0x3F,0xFC,0x41,0x02,0x42,0x02,0x06,0x02,0x0E,0x06,0x0C,0x0C,0x00,0x00},
{0x00,0x00,0x20,0x04,0x20,0x08,0x27,0x98,0x24,0xB0,0x24,0x82,0xA4,0x81,0x64,0xFE},
{0x24,0x80,0x24,0x80,0x24,0xA0,0x27,0xB0,0x60,0x1C,0x20,0x08,0x00,0x00,0x00,0x00},
{0x28,0x04,0x24,0x08,0x22,0x32,0x21,0xC2,0x26,0xC2,0x38,0x34,0x04,0x04,0x18,0x08},
{0xF0,0x30,0x17,0xC0,0x10,0x60,0x10,0x18,0x14,0x0C,0x18,0x06,0x10,0x04,0x00,0x00},
{0x02,0x02,0x82,0x04,0x73,0xF8,0x20,0x04,0x00,0x02,0x3F,0xE2,0x20,0x42,0x40,0x82},
{0x40,0x02,0x3F,0xFA,0x20,0x02,0x20,0x42,0x20,0x22,0x3F,0xC2,0x00,0x02,0x00,0x00},
{0x01,0x00,0x02,0x04,0x0C,0x1C,0x3F,0xC0,0xC0,0x1C,0x09,0x02,0x16,0x02,0x60,0x92},
{0x20,0x4A,0x2F,0x82,0x20,0x02,0x24,0x0E,0x22,0x00,0x31,0x90,0x20,0x0C,0x00,0x00},
{0x00,0x00,0x00,0x08,0x1F,0xDC,0x3F,0x08,0x3C,0x00,0x30,0x00,0x00,0x00,0x00,0x00},
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
- FPGA的DSP性能揭秘(06-16)
- 基于单片机通用引脚的软件UART设计(10-16)
- 分时操作系统思想在单片机中的具体应用 (10-30)
- 基于AT89C51+DSP的双CPU伺服运动控制器的研究(05-26)
- 关于RTX51 TINY的分析与探讨(05-30)
- 基于MC9S12DGl28单片机的智能寻迹车设计(04-03)