基于数字PID增量控制的恒温晶体振荡器

3.2 数字PID增量控制软件设计
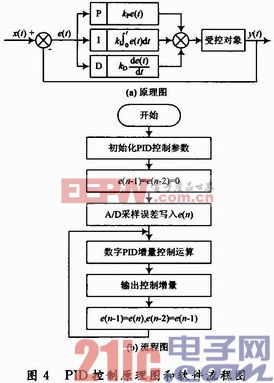
PID控制软件是系统控制的软件核心,其基本原理如图4(a)所示,它是对参考输入量与受控对象输出量的偏差时间函数进行比例(P)积分(I)微分(D)运算,得到受控对象控制量的过程,其动态方程表达式为:
式中:TI与TD分别为积分时间和微分时间;kP是比例控制参数,为减少误差累积及PID算法的精确性,这里采用数字PID增量算法,当采样周期T远小于信号变化的周期时,实际应中可以采用后向差分法对式(2)中的各项进行离散处理:

式(6)中,e(n-2)是第n-2次采样偏差,通过控制量作差,消除了偏差累积效应,当知道采样偏差e(n),e(n-1),e(n-2)的值时,便可以通过单片机进行数字PID增量控制运算得到下一时刻的控制增量,具体的软件流程如图4(b)所示。
在实际的应用中,控制器参数kP,kI,kD的调节需要根据具体的硬件系统进行设置,初始设置前可以参考相关文献的调试准则进行设置,当输出不振荡时,可以增大比例参数kP且应减小积分时间常数TI或增大微分时间常数TD。基于MSP430单片机先进的JTAG在线仿真调试技术,通过IAR软件查看程序运行过程中,偏差变量的变化情况,如图5(a)所示,为控制参数分别为kP=5,kI=0,kD=0时某一时刻的偏差变量的值。

按照相关文献报导的PID参数设置方法及硬件系统的实际特性,调节设置了控制参数分别为kP=0.85,kI=0.004,kD=0.002,经过调试后某一时刻的偏差变量值如图5(b)所示,从IAR仿真软件的变量查看表中,可以看到偏差变量的值趋于0,图6为具体硬件实物图和设置恒温晶体工作在25℃时的温度-时间(T-t)曲线图。
5 结语
本论文设计了以MSP430F4618单片机为控制核心,采用热敏电阻与INA330芯片对晶体温度进行采集转换,经数字PID增量算法输出控制增量,通过DRV593芯片驱动控制TEC对晶体进行加热或冷却,同时LCD对晶体温度进行显示,经过软件调试设置了数字PID的三个参数值分别为kP=0.85,kI=0.004,kD=0.002,使系统所采集到的温度偏差值趋于0,实现了晶体工作在25℃的恒温输出,本系统的设计研究对提高控制系统的精确控制性能有着重要意义。
恒温 晶体振荡器 MSP430F4618 PID 相关文章:
- 给单片机时钟制作一枚高稳定的恒温晶振(11-29)
- 单片机恒温箱的温控系统制作(01-25)
- 台达PLC在乳化机控制系统中的应用(06-27)
- 制作单片机恒温箱的温控系统的方法解析(06-15)
- 基于80C52单片机的电加热数字恒温控制系统设计(02-09)
- msp430f1232最小系统以及调试过程(11-17)