基于H桥控制的移动机器人系统方案
引言
近年来随着人工智能技术、计算机技术等相关技术的发展,对移动机器人的研究越来越广泛。本设计是采用OpenWrt操作系统的移动机器人,它可实现多种不同功能,如探测险情、巡视、图像采集、定位、无线通信等。它还可以作为各种智能控制方法(包括动态避障、路径规划、群体协作策略)的良好载体,开展研究。
1 系统方案
采用2层架构。上层以ARM处理器S3C2440为核心,选用MINI2440开发板作为上层的主板,负责图像采集,并将图像通过WiFi方式发送给远端的PC机。WiFi无线通信是利用PC机与无线路由器搭建环境平台共同实现的。
下层是以51单片机为核心的单片机控制板,由51单片机及外围电路组成。下层主要负责机器人移动控制,传感器数据处理。51单片机通过I/O口输出PWM信号控制直流电机的转速和转向,实现机器人的前进、停止、左转和右转。单片机接口电路上挂接了1个超声波测距模块、1个人体红外感应模块、1个步进电机模块。超声波测距模块用来实现机器人避障。在嵌入式智能的前端安装了一个步进电机,而超声波测距模块安置在步进电机的转轴上,步进电机不停地来回转动,超声波测距模块也随之转动。这样用1个超声波测距模块就可实现多方位测距,从而减少了超声波测距模块的数量。
机器人主要由硬件系统和软件系统构成。硬件系统主要包括:ARM处理器、单片机、外围接口电路、机器人底盘以及电源等。其中ARM处理器是上层的核心,51单片机是下层的核心。软件包括:嵌入式Linux操作系统、外设驱动程序、Linux应用程序以及单片机应用程序等。系统没有选用通常的嵌入式Linux版本,而是另辟蹊径,选用一种独特的嵌入式Linux发行版之一OpenWrt作为操作系统。OpenWrt提供了一个完全可写的文件系统及软件包管理,它通过简单易用的方式,降低了嵌入式Linux开发的门槛,提高了系统软件开发的效率。
嵌入式智能移动机器人的工作流程为:传感器模块实时采集周围环境信息,将此数据信息传输到机器人控制系统中,单片机通过数据分析获取有效数据,从而获知机器人与障碍物的相对位置,然后根据此位置信息产生控制信号;单片机产生PWM信号控制直流电机来控制机器人转向,从而达到机器人自主“行走”的目的。下层的单片机与上层的ARM处理器通过串口来通信,ARM主板可将下层单片机控制板的工作数据通过无线WiFi的方式传输到远端的PC机。ARM主板可以不间断地将USB摄像头采集的清晰现场图片发给远端的PC控制终端。
2 系统硬件设计
硬件系统主要包括:ARM处理器、单片机、外围接口电路、机器人底盘以及电源等,其中ARM处理器是上层的核心,51单片机是下层的核心。硬件结构框图如图1所示。
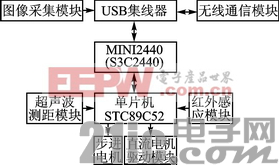
图1 硬件结构框图
由图1可以看出,系统主要由以下模块构成:图像采集模块、无线通信模块、超声波测距模块、红外感应模块、MINI2440、单片机STC89C52以及直流电机驱动模块等。下面重点介绍直流电机驱动模块。
直流电机驱动模块以L298N芯片为核心,该芯片具有带载能力强的特点。直流电机驱动电路如图2所示。驱动电路芯片的外围电路主要是由二极管构成的电桥电路与2组电机并联连接,以达到控制电机按照设定运转的目的。
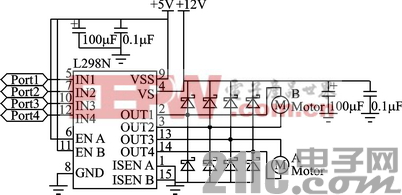
图2 直流电机驱动电路
移动机器人采用H桥控制方案,整体控制方案如图3所示。

图3 H桥控制方案
电机共有4路PWM输出分别作为左右轮的驱动,而通过2路PWM输出可控制一个电机,两个电机以并联方式连接。
当L298N芯片使能信号ENABLE为高时,输出才随输入变化,否则为高阻态,所以焊接时,ENABLE引脚及电源引脚VS均接电源VCC.
具体驱动过程为:通过编程由控制芯片经PWM发出驱动信号,PWM输出作为L298N的输入,经L298N转换输出控制信号使电机转动,从而实现电动机的驱动。
PWM输出信号的高低则可以控制直流电机转速。当占空比加大时,转速升高;占空比减小时,转速降低;当PWM信号输出占空比为0时可控制电机的停止。
当左轮停止,右轮转时,小车左转;当右轮停止,左轮转动时,小车右转。而2路PWM输出的正负顺序转换则可控制电机的正反转,进而控制小车的前进和后退。
3 系统软件设计
软件部分是移动机器人的智能化的体现,它控制移动机器人所有的运行状态。
操作系统采用了OpenWrt操作系统,该系统简化了Linux内核的定制过程,而且允许开发者使用软件包的概念来定制嵌入式设备,从而简化了嵌入软件开发的流程。
程序在Kubuntu CodeBlock IDE集成开发环境中进行编写,用Openwrt编译出来的ARM eabi交叉编译工具编译,再经过终端SercurtCRT通过串行口向移动终端烧入交叉编译后的程序以及系统。
应用软件控制小车的避障、摄像、发
- Linux嵌入式系统开发平台选型探讨(11-09)
- VxWorks实时操作系统下MPC8260ATM驱动的实现(11-11)
- VXWORKS内核分析(11-11)
- Linux内核解读入门(11-09)
- linux文件系统基础(02-09)
- 基于Winodws CE的嵌入式网络监控系统的设计与实现(03-05)