基于单片机的教育机器人的设计
序对测试转速和设定转速进行差值计算得到输出值,用于配置PWM的输出,控制电机转速。主程序和定时器TO中断处理流程图如图4所示。

图4 主程序和定时器TO中断处理流程图
4.1 模糊PID参数自整定控制器原理
PID参数模糊自整定是找出PID中3个参数与e和ec之间的模糊关系,在运行中通过不断检测e和ec,根据模糊控制原理来对3个参数进行在线修改,以满足不同e和ec对控制参数的不同要求,而使被控对象有良好的动稳态性能。从系统的稳定性、响应速度、超调量和稳态精度等方面来考虑,Kp,Ki,Kd的作用如下:Kp的作用是加快系统的响应速度,提高系统的调节精度;Ki用于消除系统的稳态误差;Kd改善系统的动态性能。图5是PID控制器设计结构原理图。
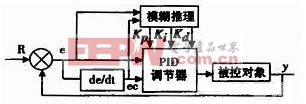
图5 PID控制器设计结构原理图
由PID各个参数对系统的影响得到:
(1)当误差|e|较大时,说明误差的绝对值较大,不论误差的变化趋势如何,都应该考虑控制器的Kp取较大值,以提高响应的快速性;而为防止因为|ec|瞬时过大,kd应该取较小的值;为控制超调,ki也应该取值很小。
(2)当误差|e|在中等大小时,为保证系统的相应速度并控制超调,应减小Kp,Ki值应增大,Kd应适中。
(3)当误差|e|较小时,为保证系统具有良好的稳态特性,应加大Kp、Ki的取值,同时为避免产生振荡,Kd的取值应该和|ec|联系起来。
教育机器人属于典型的非线性、时变、模型不确定复杂系统。在实际中,机器人行驶道路有直道、大弯道、“S”型小弯道。利用教育机器人在相同的路况下其特性基本不变,可分别确定这3种道路参数下的最佳PID参数。其核心思想是把控制周期内的机器人状态视为不变,只要控制周期较短,就可实现很好的控制效果。在机器人实际的行使中,每10ms进行1次控制,可满足要求。
4.2 PID参数设定
模糊PID控制根据系统运行的不同状态,考虑Kp、Ki、Kd三者的关联,根据工程经验并依据各参数的作用,通过大量的测试获得本系统对应路况下的PID参数,实验数据如下:
(1)在直道上系统取kp=3,Ki=5,kd=0,测试环境为一条长度5 m的长直道;
(2)在大弯道上系统取kp=10,Ki=1,kd=1,测试环境为直道进入一个半径为100 cm的3/4圆;
(3)在“S”型小弯道上系统取kp=7,Ki=4,kd=3,测试环境为3个90度圆弧构成的"S"型小弯道。
5 结束语
用STC12C5A60S2单片机配合红外光电阵列检测模块对直流电机执行参数自整定模糊PID控制器,解决了直流电机在巡航过程中产生抖动前进的控制问题,使得教育机器人在行走的过程中更平稳,且控制方法简单、实用。
参考文献:
[1].MAX810datasheethttp://www.dzsc.com/datasheet/MAX810_1019165.html.
[2].LM7805datasheethttp://www.dzsc.com/datasheet/LM7805_843721.html.
[3].L298Ndatasheethttp://www.dzsc.com/datasheet/L298N_442931.html.
单片机 教育机器人 STC12CSA60S2 相关文章:
- FPGA的DSP性能揭秘(06-16)
- 基于单片机通用引脚的软件UART设计(10-16)
- 分时操作系统思想在单片机中的具体应用 (10-30)
- 基于AT89C51+DSP的双CPU伺服运动控制器的研究(05-26)
- 关于RTX51 TINY的分析与探讨(05-30)
- 基于MC9S12DGl28单片机的智能寻迹车设计(04-03)