单片机驱动CPLD的PWM正弦信号发生器设计
59,68,77,84,90,95,98,99,98,95,90,84,77,68,59,49,40,30,22,14,8,4,1,0,1,4,8,14,22,30,40};// 正弦表
void main()
{
unsigned char i=0;
while(1) {
PWM = sine_dot[i];
i=(i++)0x1f;
}// 如果要严格控制SPWM 的周期,这里的while 循环请用定时器来驱动
}
四、三路精确相位差正弦信号发生器
对CPLD 改进设计,很容易实现多路PWM 输出。
例如设计具有精确相位差的三相正弦信号,CPLD 电路VerilogHDL 程序如下:
module Mini51b_PWM(P0,ALE,P27,WR,PWM);
input [7:0]P0;
input ALE,P27,WR;
output [2:0]PWM;
wire [3:0]addr;
reg [7:0]daPWMc;
reg [7:0]daPWMs0,daPWMs1,daPWMs2;
reg [2:0]PWM;
wire clk,nclk,a,b,c,d;
assign addr= (ALE)?P0[3:0]:addr; // 低八位地址锁存
always @(negedge WR)
begin
case({P27,addr})
5'H10: daPWMs0 = P0;// 写带地址的寄存器
5'H11: daPWMs1 = P0;// 写带地址的寄存器
5'H12: daPWMs2 = P0;// 写带地址的寄存器
default:
begin
daPWMs0 = daPWMs0;
daPWMs1 = daPWMs1;
daPWMs2 = daPWMs2;
end
endcase
end
always @(posedge clk) begin
daPWMc = daPWMc+1; //PWM 调整精度1%
if(daPWMs0 daPWMc) PWM[0] = 0;//PWM 发生器
else PWM[0] = 1;
if(daPWMs1 daPWMc) PWM[1] = 0;//PWM 发生器
else PWM[1] = 1;
if(daPWMs2 daPWMc) PWM[2] = 0;//PWM 发生器
else PWM[2] = 1;
end
assign nclk=!clk;
LCELL A0(。in(nclk), .out(a));
LCELL A1(。in(a), .out(b));
LCELL A2(。in(b), .out(c));
LCELL A3(。in(c), .out(d));
LCELL A4(。in(d), .out(clk));//PWM 时钟来自CPLD 内部
LCELL 延迟电路振荡器
endmodule
与之对应的MCU 演示程序:
#include reg51.h>
#include absacc.h>
#define PWM0 XBYTE[0xfff0]
#define PWM1 XBYTE[0xfff1]
#define PWM2 XBYTE[0xfff2]
unsigned char code sine_dot[36]= //8 阶,36 点正弦表
{
0x80,0x96,0xab,0xbf,0xd2,0xe2,0xee,0xf8,0xfe,0xff,0xfe,0xf8,
0xee,0xe2,0xd2,0xc0,0xab,0x96,0x80,0x69,0x54,0x40,0x2
d,0x1e,
0x11,0x07,0x01,0x00,0x01,0x07,0x10,0x1d,0x2d,0x3f,0x53,
0x69
};
void main()
{
unsigned char a,b,c;
a=0;
while(1) {
a %= 36;// 对36 取余数及0~35
b=(a+12)%36;// 较a 路滞后120 度相位
c=(a+24)%36;// 较a 路滞后240 度相位
PWM0 = sine_dot[a];
PWM1 = sine_dot[b];
PWM2 = sine_dot[c];
a++;
}
}
实际得到的三相正弦信号示波器截图效果如图7所示,只是双踪示波器同时只能看两路信号。
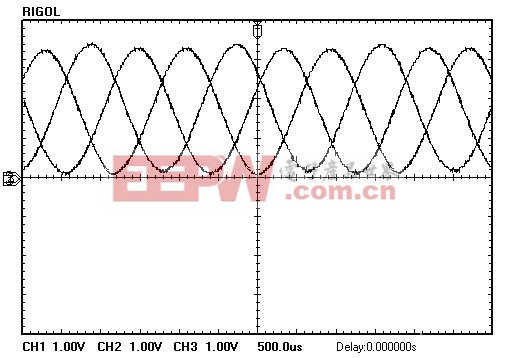
图7 具有精确相位差的三相正弦信号示波器截图
五、结束语
今后,MCU+CPLD 结构将是很多电子系统设计的一种基本架构,MCU 可以用程序实现复杂智能的控制与检测,CPLD 又可以实现灵活多变的外围扩展电路设计,尤其是可以用硬件实现特殊的MCU 无法实现的功能,弥补MCU 响应速度慢影响实时性问题,两者互补,完全实现硬件软设计,使得同一硬件平台能够通过软件实现更多的功能。
- 单片机驱动DM9000网卡芯片详细调试过程(12-03)
- 单片机驱动 Led 灯应注意(12-03)
- 单片机驱动点阵向上流动显示I Love U -Love漂亮的心形(12-02)
- SLE4442卡_IC的51单片机驱动程序(12-02)
- T6963C的51单片机驱动程序(12-02)
- MSP430F149单片机驱动DS2762读写操作C语言程序(12-01)