基于SOC单片机的pH值检测与控制
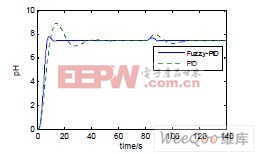
,Ki和Kd与偏差e和偏差变化率ec之间的模糊关系,在运行中通过不断检测e和ec,根据模糊控制规则对3个参量进行在线修改,以满足不同e和ec对控制器参数的不同要求,而使被控对象有良好的静、动态性能。本文将偏差e和偏差变化率ec作为模糊控制器的输入,调节PID控制器的3个参数Kp,Ki和Kd,从而控制执行机构电磁阀调节输出。根据事先确定好的模糊控制规则作出模糊推理改变3个PID参数的值,利用模糊控制规则在线对PID参数进行修改,修正后的PID参数则被应用到常规PID控制中用以提高系统的控制性能,这构成了自适应模糊PID,其结构如图4所示。 图4 自适应模糊PID的控制框图 将系统误差e和误差变化率ec变化范围定义为模糊集上的域,e,ec={-3,-2,-1,0,1,2,3},其模糊子集为e,ec={NB,NM,NS,ZE,PS,PM,PB},子集中元素分别代表负大、负中、负小、零、正小、正中、正大。对于单片机构成的模糊控制器,考虑到占用CPU时间,节约存储空间,减少计算量等方面的问题,隶属度函数曲线采用三角形。根据各模糊子集的隶属度赋值表和各参数模糊控制模型,应用模糊合成推理设计PID参数的模糊矩阵表,查出修正参数代入下式计算:在线运行过程中,控制系统通过对模糊逻辑规则的结果处理、查表和运算,完成对PID参数的在线自校正。 3 计算机仿真及结果 3.1 仿真模型的建立与算法实现 数字仿真模型如图4所示,其中被控制对象包括:电磁阀传递函数 3.2 仿真结果分析 为了便于比较控制效果,在常规 PID 和模糊PID 控制中PID 的3 个参数kp,ki,kd 是相同的。图5 给出了常规PID 控制与模糊PID 参数自整定算法控制仿真曲线比较,图6 是在常规PID 控制与模糊PID 均达到稳定后,在t=80s 时加扰动仿真曲线。图5、图6 中虚线所标示的是常规PID 的仿真效果,实线标示的是模糊PID 的仿真效果。从仿真结果可看出: (1)模糊PID 参数自整定控制具有较小的超调量和较短的调节时间,具有较好的动态响应特性和稳态特性,它优于常规的PID 控制; (2)由于模糊PID 参数自整定控制能根据工况变化过程中偏差和偏差变化率自动进行PID 参数调整,因而具有较好的自适应能力。 由此可见,模糊PID 参数自调整对于pH 值的控制具有较好的控制效果,具有动态性能好,稳态精度高,抗干扰性能好及较强的鲁棒性的特点。 图 5 常规PID 控制与模糊PID 控制效果比较 图 6 存在扰动时的控制效果比较 4 结论 基于 SOC 高性能单片机C8051F020 设计pH 值检测控制仪器具有性能好、抗干扰性强、有较高的性价比,针对pH 值滞后、非线性、时变、耦合性等特点采用的模糊PID 在线自适应控制方法具有动态性能好,稳态精度高,抗干扰性能好和具有较强的鲁棒性。 本文作者创新点:根据 pH 传感器信号检测的特点设计了pH 信号放大电路、抗干扰电路;根据pH 值测量原理提出了pH 电极的校正方法;根据水环境pH 值的特点采用了模糊PID 控制方法并仿真,同时与常规PID 控制效果做了比较。参考文献: [1].C8051F020 datasheethttp://www.dzsc.com/datasheet/C8051F020+_209830.html.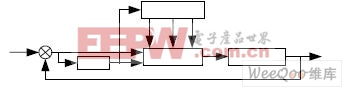
 ,pH传感器动态特性
,pH传感器动态特性
,pH滴定曲线的非线性特性等。运用上述模糊PID参数自整定控制方法,将模糊逻辑工具箱(fuzzy logic tool box)与Matlab函数相结合,在Matlab7.1中Simulink环境下进行了仿真研究。其中,模糊推理方法采用Mamdani型推理,去模糊化采用加权平均值方法。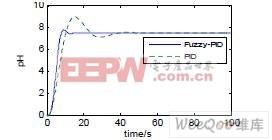
[2].MCS-51datasheethttp://www.dzsc.com/datasheet/MCS-51_477840.html.
[3].CA3140datasheethttp://www.dzsc.com/datasheet/CA3140_211595.html.
- 基于SOC单片机的定位监控系统设计(08-15)
- 基于嵌入式的术后引流负压吸引器的设计(12-24)
- 基于USB的pH值控制器数据通讯的实现(06-28)
- 基于单片机的温湿度检测与控制系统研究(01-07)
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)