单片机多CPU系统设计
单片微机具有小巧灵活、易扩展成为功能强大的控制系统。目前,一些监控终端以及许多独立的控制系统(如:发电机的微机励磁装置)多以单片微机为核心构成。但由于诸如工作环境恶劣、电磁干扰等原因,即使使用按工业测控环境要求设计的单片微机也难以保证控制系统能长期可靠的运行,从而导致控制系统瘫痪。这样,如何提高控制系统的可靠性,保证测控系统能正确稳定的运行就尤为重要。显然,采用双CPU冗余设计是非常有效的一种解决办法。由于单片微机的功能强大,价格低廉,为设计双机冗余系统提供了很好的条件。为此,我们设计了一种由两片单片微机组成的双机容错系统,以比较简单和与传统的多CPU系统完全不同思路的设计方法实现了双机的互为备用及相互切换。在该双机冗余系统设计中,其关键问题是双机系统的重构策略和双机系统的仲裁逻辑切换。
1 传统的多CPU系统设计方法
传统的多CPU系统的常用设计方法有三种:
① 利用双口RAM实现CPU之间的通信。双口RAM是一种高速的并行传输芯片,具有两套I/O口和竞争裁决电路,可以同时联接两个CPU,这样通过双口RAM可以实现多CPU之间通信。
② 利用共享内存的方法实现CPU之间的通信。这种方法与上一种方法类似,所不同的是,上一种方法是利用双口RAM的竞争裁决电路实现对RAM的访问,而这种方法是利用不同的时序实现内存共享的。
③ 利用总线方法实现CPU之间的通信。通过接口芯片或CPU本身具备的SPI、I2C以及SMBus等接口实现CPU之间的通信。
2 该双CPU系统的结构和工作原理
该双CPU控制系统与传统的多CPU系统的设计方法完全不同,它由两片Atmel公司生产的AT89C51 CPU构成,双机互为备用,彼此独立并行运行,硬逻辑切换。其双CPU控制系统原理框图如图1所示。
这是一种非表决式的双机冗余系统,一个CPU 作为另一CPU的热备份 ,双机在任务上同步运行。所有输入信号通过输入接口同时送给两个CPU,但CPU 运算、处理后的输出量受到仲裁切换电路的控制,只有主CPU允许读写外部数据存贮器及输出至外部设备,当主CPU发生故障时,系统的自我检测切换逻辑将发出信号,自动切断其输出通道,并通过CPU的工作指示系统报警。此时,系统或自动或人工切换到另一个备用的CPU,并同时打开其输出通道,备用机变为主机运行状态,控制系统这时降级为单机运行。人们可以将原主机拔离系统以便进行维修。从图中可知,两个CPU的地址、数据及控制总线都通过一组三态门(三态门1、2)输出与外部数据存贮器相接,两个CPU的某些输出控制I/O口都通过另一组三态门(三态门3、4)输出与外部输出控制设备相接,两组三态门的控制端都同时受仲裁切换电路控制,而仲裁切换电路的两路输出互为反逻辑,即只有一路输出能使所控制的对应三态门(如三态门1、3)正常输出,另一路输出使所控制的对应三态门(如三态门2、4)处于高阻状态,从而不影响主CPU正常读写数据和向控制I/O口输出数据。
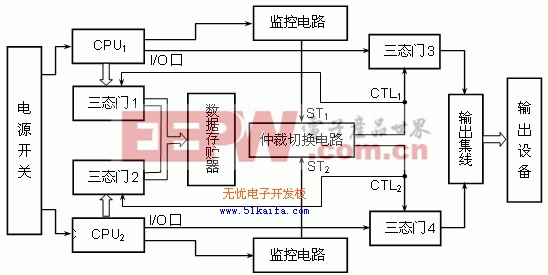
图1双CPU控制系统原理框图
表1 双机仲裁切换逻辑真值表
|
3 双机仲裁切换逻辑电路
在该双CPU控制系统中,两者互为热备份,同时运行,一台为主机,另一台为备份机。在双CPU都正常运行的情况下,系统默认CPU1为主机, CPU2为备份机。当主机出现故障时,要求系统能自动切换到备份机,使备份机提升成为主机,从而代替原主机从故障发生处连续运行并发出报警信号。同时要求能通过手动开关人为选定主机运行。设判别两个CPU是否正常工作的信号分别为ST1、ST2,工作正常时它们的状态为1,工作不正常时状态为0。仲裁切换电路输出为0的控制端控制工作正常的CPU的相应三态门组使能,仲裁切换电路输出为1的控制端控制另一CPU的相应三态门组禁止输出。自动或手动选择主机的控制开关为S,当两个CPU都工作正常时,可通过S开关自动选择或指定主机(当S开关状态为1时为自动默认CPU1为主机,当S开关状态为0时则强制CPU2为主机);当两个CPU中任意一个工作不正常时,则此时与S开关的状态无关,仲裁切换电路的输出能确保只有与工作正常的CPU相连的三态门组的使能端为0,从而控制该正常CPU正常读写数据和输出控制;当两个CPU都不正常时,仲裁切换电路的两个输出都为1,两个CPU都不能正常读写数据和输出控制。这样当两个CPU中任何一个或全正常时就能保证只有一个CPU能正常读写数据和输出控制,当两个CPU都不正常时,则理所当然系统不能正常工作。按要求可得真值表如表
- FPGA的DSP性能揭秘(06-16)
- 基于单片机通用引脚的软件UART设计(10-16)
- 分时操作系统思想在单片机中的具体应用 (10-30)
- 基于AT89C51+DSP的双CPU伺服运动控制器的研究(05-26)
- 关于RTX51 TINY的分析与探讨(05-30)
- 基于MC9S12DGl28单片机的智能寻迹车设计(04-03)