基于西门子S7-300 PLC的箍筋生产设备
建筑是人类生活的基础设施和基本条件之一,随着生活水平的提高和人类社会的发展,人们对建筑的需求越来越迫切,建筑工程的规模和数量在不断增长。在我国的建筑行业中,钢筋混凝土结构结构的建筑还占有相当大的比重。在钢筋混凝土结构的建筑中,钢筋是整个建筑的骨架,它由主钢筋和箍筋等构成。箍筋的形状和尺寸跟主钢筋的设计有关系,并且它的用量要比主箍筋的用量多许多倍。但在现实的箍筋生产中,箍筋的生产有两部分组成:一种是校直装置,另一种是弯箍成型的装置。当前的简易弯箍设备远远不能满足大批量、多品种的加工模式,工人的劳动强度大,生产效率低,人工成本很高。
二 S7-300简介及硬件/网络组态
SIMATIC S7-300是德国西门子(Siemens)公司生产的模块化中小型PLC系统,能满足中等性能要求的应用。S7-300系统通过各种单独的模块之间的组合可进行构成不同要求的系统;S7-300的指令系统具备高速(0.6~0.1μs)的运算速度;S7-300支持用浮点数和反三角函数运算,能够有效地进行更为复杂的算术运算;S7-300通过统一的Step 7软件方便、简单的给所有模块进行组态和参数赋值;S7-300具备多级口令保护可以使用户高度、有效地保护其技术机密,防止未经允许的复制和修改;S7-300具备强大的通信功能,它多种不同的通信接口,并通过多种通信处理器来连接AS-I总线接口和工业以太网总线系统,多点接口(MPI)集成在CPU中,用于同时连接编程器、PC机、人机界面系统及其他SIMATIC S7/M7/C7等自动化控制系统。
弯箍的过程中涉及到了大量的计算,我们需要一种能支持强大运算功能的PLC,西门子的S7-300正好符合我们的要求。西门子的Step 7 ProfessionalV5.4 SP3 编程软件支持LAD,STL和FBD三种编程语言,并且支持三种编程语言的混编,大大的提高了编程的效率。
所以针对箍筋生产的现实情况,考虑到使用环境为高粉尘、高电磁干扰,已超出了工控机的承受范围,我们选择了一种用先进的、成熟的S7-300 PLC主要核心、以触摸屏为人机界面(HMI)、以安川交流伺服驱动系统为执行机构的方案进行自动化箍筋生产设备的设计。
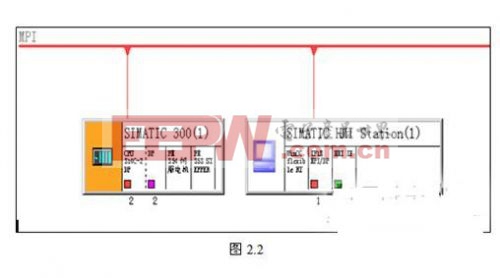
以S7-300为核心的控制系统包含CPU314C-2DP(CPU)、FM354(驱动牵引部分的控制器)、FM353(弯曲部分的控制器)、SM321(输入模块,反馈各种执行机构的动作完成位置是否正确和控制信号)、SM322(输出模块,控制各种电磁阀的动作)构成,如下图所示:

S7-300与触摸屏的连接网络我们选择MPI,CPU314C-2DP的MPI地址设为2,SM354的MPI地址设为3,SM353的MPI地址设为4,HMI的地址设为1,网络组态如下图所示:
三 工作原理
根据箍筋生产的实际情况,我们采用将校直装置和弯箍成型装置放置在一起的方案。校直部分主要由横、竖两排矫直辊组成,通过辊子的挤压来去掉钢筋的弯曲应力,如下图所示。为了方便用户的调整,上半部分的矫直辊的位置可以调节,以适应不同直径的钢筋。

校直装置由一个11KW的交流伺服电机来牵引,牵引的同时完成送料。
弯曲部分采用绕弯的方式,以一个轴为中心,另一个轴臂围绕此轴旋转,如下图所示。整个弯曲部分可以一弯曲时的钢筋为中心伸出/退回,也可以进行顺时针/逆时针的旋转。弯曲的速度和角度有定位模块FM353来控制,实现了高速、精确定位
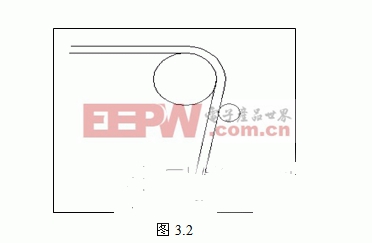
旋转部件的也由以一个7.5KW交流伺服电机来牵引。
当箍筋加工完成后,由普通的三相异步电动机通过曲柄连杆机构带动剪刀把钢筋剪断,然后进行下一个循环。
四 软件的实现
S7-300 PLC系统编程软件选用STEP 7 Professional V5.4 SP4编程软件包(为了能FM354、FM353对进行设置,我们要安装四门子提供的Simatic S7 FM353/FM354 Parameterization Version 4.03.04),采用模块式的面相对象的思想进行编程,完成硬件组态、参数设置、PLC程序编制、测试、调试和文档处理。
由于STEP 7 Professional V5.4 SP4支持在同一个块内同时使用LAD,STL和FBD三种编程语言。对于系统中的逻辑控制选用梯形图编程,构成FC块,实现各机组执行机构的电气控制和工序逻辑功能;对于数据处理的部分则采用语句表编程,构成FB块。浮点数运算和反三角函数的运用极大地简化了检测盘上的外部旋转编码器的脉冲信号的输入与钢筋送进长度之间之间的换算关系,实现较为复杂的算术运算和逻辑、定位控制等功能,具体的程序结构见下图。
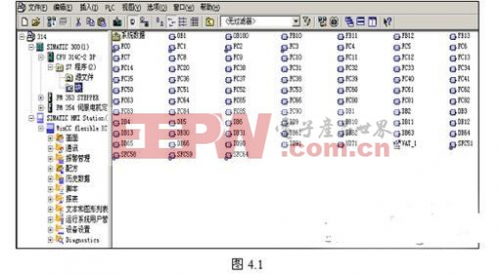
其中OB 100是热启动组织块,系统启动就调用OB 100,主要作用是初始化各种数据并且把内部存储的各种状态复位;OB1是主程序块,它调用各种FC和FB更新来自MPI总线上的数据块中的的数据,控制伺服驱动器完成定位,控制各个
- 盘点西门子PLC串口通讯方法(12-21)
- PROFlBUS总线在西门子840D i数控系统中的应用(12-21)
- 西门子全集成自动化解决方案在华晨宝马的应用(12-21)
- 西门子RFID技术使牛奶运输过程更透明更易控制(12-20)
- 西门子SIMATIC系统在安全防爆场所的应用(12-20)
- 西门子S7-200在电力无功补偿中的应用(12-20)