Keil C51精确延时程序设计
可以看出,高电平或者低电平占的时间分别为2 ms,即为以上延时程序所执行的时间,由于示波器精度的问题,存在误差为2μs。所以用这种方法确定延时时间,会存在一定误差。
2.2 利用Keil C51确定延时时间
2.2.1 Keil C51反汇编
对于经验丰富的开发者,可以利用Keil C51中反汇编的功能,仔细分析C语言转化成的汇编代码,从而也可以计算出代码执行所需的时间,精确得出延时时间。在Keil C51中编写好程序后,按ctrl+F5进入软件调试状态,然后点击工具栏的view → disassembly window,即可看到编译生成的汇编代码。例如2.1中例子的汇编代码为:
分析上面的汇编代码,可以看出调用delay函数时,先执行MOV R7,#0xF9然后执行LACALL跳转到delay函数的入口处,一共占用3个机器周期。而地址0x000F到0x0013的指令一共被执行了250次,0x0015到0x0016的语句被执行了249次。最后执行PET语句,占用2个机器周期。则delay函数的执行时间△t=3×249+5×250+5=2 002μs。另外从上述汇编语句中可以看出,P1=P1^0x01相当于汇编中XRL direct,#data指令,占用2个机器周期。
2.2.2 Keil C51软件调试模式
在开发过程中,还可以利用Keil C51编译器中的断点调试功能来模拟执行延时代码所需的时间。上述举例进入软件调试状态后如图2所示。
光标为当前程序的停止处,左侧的寄存器窗口可以看到一些寄存器名称及其值。可以通过设置断点的功能,每遇到断点,程序会自动停止在断点处。“sec”中数据的变化即为程序执行处到断点处所需的时间。对上述程序将断点设置在“P1=P1^0x01”代码处,然后点击全速运行可以得表2所示。
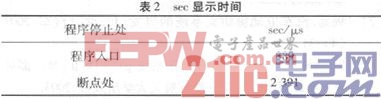
从表2可以看出,delay函数执行的时间△t=2 391-389=2 002μs,与理论分析结果一样。
3 应用实例
DS18B20是一款单总线数字式温度传感器,对其控制必须按照严格的时序要求,有3个重要时序,分别是初始化、读以及写时序,时序图如图3所示。

由图3可知,涉及到延时程序的要求为:
初始化。(1)将总线低480~960μs,然后释放总线。(2)DS18B20等待15~60μs,然后返回低电平并持续60~240μs的存在脉冲。
写时序。(1)将总线置低电平并且持续15μs后发送数据的某一位。(2)延时60~120μs然后将总线拉高并持续至少1μs的时间后开始下一次发送。
读时序。(1)将总线置低电平,并且持续至少1μs,然后释放总线。(2)释放总线后15μs内读取并处理数据。(3)处理数据后延时,保证第一个步骤到延时结束时间至少60μs后为电阻上拉状态。
采用延时程序的设计方法,利用for循环编写delay函数和_nop_()函数控制DS18B20。
通过以上延时程序的控制方法,DS18B20稳定实现了温度采集。充分说明了高效的延时程序设计,在开发一些需要使用到延时程序时,可以先用Keil C51先设计好延时程序,然后利用以上方法进行分析计算,最后直接调用,可节省大量的时间、提高CPU的使用效率。
4 结束语
Keil C51具有强大的功能,只要利用合理,可以给开发者节省大量的时间,从而提高开发效率。另外在设计延时程序的时候,应该综合考虑各种延时程序的特点,以优化CPU的使用效率。
- MCS-51系列单片机结构化程序设计探讨(04-20)
- 状态机在单片机程序设计中的应用(05-01)
- ARM处理器的位置无关程序设计(09-19)
- 基于分布式处理技术的物联网数据库设计(05-21)
- 模块化管理和设计(12-01)
- 马踏棋盘的实现(12-01)