PLC与WinCC flexible在远程供水系统中的应用
证了变频器的输出端与工频不可能短接,避免切换时造成炸机、跳闸等故障。 对变频器的启/停控制,是将输出端连接的交流接触器是先接通,然后再给出变频器运 转命令;变频切换工频时,变频器需停机时,是先给出变频器停止命令,变频器停掉后,再断开接触器的。其中有0.5s的时间间隙,较好地避免了对变频器的冲击。 图1-2供水系统主电路图 Fig.1-2 The main circuit of the water supply system 3 PLC程序设计 3.1自动运行模式: 西门子系列PLC编程采用STEP7软件,它是西门子PLC的视窗软件支持工具,提供完整的编程环境,可进行离线编程和在线连接和调试,并能实现梯形图与语句表的相互转换。 系统程序包括主程序和电机切换程序,PID子程序。主程序主要作用是调用其他子程序;电机切换程序根据PID的运算输出来决定两个泵的运行状态。PID子程序主要是对现场采集的数据进行运算,以达到安全稳定的控制精度。数据采集程序用于将现场的数据采集到PLC中,用于PID控制以及在触摸屏中显示,便于现场操作。 1.主程序:主程序的作用是初始化子程序,调度子程序,降低程序复杂度,使程序的设计,调试和维护等操作简单化。在主程序中,设置两个变频器频率上下限到达滤波时间继电器,用于稳定系统。 2.PID子程序:Micro/WIN提供了PID Wizard(PID指令向导),可以帮助用户方便地生成一个闭环控制过程的PID算法。此向导可以完成绝大多数PID运算的自动编程,用户只需在主程序中调用PID向导生成的子程序,就可以完成PID控制任务。PID的运算数据存储区是自动分配的,向导将自动为其参数表分配符号名,用户不要再自己为这些参数分配符号名,否则将导致PID控制不执行[4]。PID向导中断用的是SMB34定时中断,在用户使用了PID向导后,注意在其它编程时不要再用此中断,也不要向SMB34中写入新的数值,否则PID将停止工作。为保证PID子程序的正常运行,必须用SM0.0来使能PID子程序,SM0.0后不能串联任何其他条件,而且也不能有越过它的跳转;如果在子程序中调用 PID子程序,则调用它的子程序也必须仅使用SM0.0调用。 图3-1 PLC控制主流程图 Fig.3-1 Flow chart of PLC control 3.电机切换程序:包括加电机程序和减电机程序,在控制系统作用下,变频器开始运行,启动第一台水泵M1,当输出压力达到设定值,转速才稳定到某一定值,这期间M1在PLC和变频器的控制下处在调速运行状态。当用水量继续增加,变频器输出频率达到工频时,水压仍低于设定值,由PLC控制切换至工频电网后恒速运行;同时,使第二台水泵M2投入变频器并变速运行,系统恢复对水压的闭环调节,直到水压达到设定值为止。 降压控制:当用水量下降水压升高,变频器输出频率降至PLC程序中设定的变频器下限频率时,水压仍高于设定值[5],系统将工频运行的一台水泵关掉,继续变频运行另一台水泵,使压力重新达到设定值。 在电机切换程序中,从变频器输出端切断电机的接触器,其控制启动按钮与变频器启动按钮联锁,即启动接触器接通电机后,变频方可启动;电动机接入工频的接触器,其线圈控制回路由变频器输出端切断电机的接触器的常闭触点控制,保证变频器输出端切断电机后接入工频; 用plc控制切换过程时,变频自由停车到切除电机要有0.1秒的延时,由电机从变频切除到工频接通要有0.2-0.4秒的延时,整个过程最多0.5秒完成; 工频转变频的操作,首先切断工频与电机的连接,然后接通变频输出与电机的连接。变频转工频的操作,首先要断开变频器的输出,为保证转换瞬间不跳闸,适当延时一段时间,然后工频转变频接触器转换。 PLC设计一套变频调速恒压供水系统,该系统可根据管网瞬间压力变化自动调节两台水泵的转速及其投入与退出[6],使管网主干管出口端保持在恒定的设定压力值,并满足用户的流量需求,使整个系统始终保持高效节能的最佳状态。 该系统也可以通过人意修改参数指令(如压力设定值、控制顺序、压力上下限、PID值等);具有完善的电气安全保护措施,对过流、过压、欠压、过载、断水等故障均能自行诊断并报警。 3.2手动运行模式: 在PLC或者变频器故障的情况下,操作人员可以在现场根据当时的管网压力的需要,利用控制柜面上的按钮开对两台泵的启停和变频工频运行状态进行控制,每台泵都有变频、工频和运行、停止按钮。 4上位机控制程序设计 WinCC是西门子公司开发的上位机组态软件,主要用于对生产过程进行监控,基于微软公司的Windows2000或Windows NT操作系统,作为一款监控软件,能提供对工业自动化系统进行监视、控制、管理和集成等一系列的功能,同时也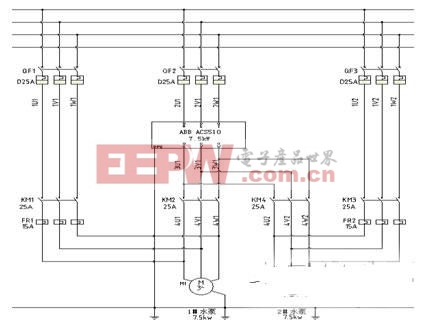

- 嵌入式系统硬件平台的软件PLC实现方法(04-12)
- 利用数字信号控制器实现稳健的PLC通信(05-02)
- 基于Linux系统的软PLC设计(07-19)
- 基于VxWorks的嵌入式实时PLC设计(01-08)
- 基于AT89C51单片机的微型可编程控制器(04-23)
- 基于DSP的光纤监控网络系统方案(08-03)