张力控制 收卷 放卷 PID调节
2.2 软件设计流程 3 张力控制过程 4 结论
STM32芯片的软件编写,可以使用程序编写软件keil uvision4。keil uvision4不仅对Cortex_M3内核有很好的支持,而且配置和使用也较为方便,同时还包含有STM32的固件库函数。张力控制的软件是整个控制过程的灵魂,在合理的硬件电路上,它主宰着所有的控制流程。当芯片上电工作时,我们必须把系统时钟和一些需要用到的外设进行初始化。然后利用时间片轮转的方式实时地控制输入、输出和显示模块。
系统初始化是为芯片可以正常的工作做准备。这里首先要初始化系统的时钟,把工作频率由8 M(外接8 M石英晶体)倍频到72 M,然后初始化内部FLASH的读写权限,最后使能总线上用到外设的时钟。使能外设定时器3,开启PWM功能。
由图1可知,控制器要处理两个外部输入信号,一是测量角速度,我们可以通过测量滚轴旋转一周所花的时间得到。这里使能了外部中断和定时器2中断,当滚轴转动时,轴上面的齿会使角速度测量器反馈给控制器一个上升沿,在下一个上升沿来时,我们可以利用定时器2得到两次上升沿经过的时间,从而计算出滚轴的角速度。在给定了滚轴的直径后,可以进一步推算出滚轴的线速度;二是测量张力,正确利用STM32控制器的外设ADC,首先要把硬件对应接入的GPIO引脚配置成模拟输入模式。配置好ADC和DMA的工作模式,利用DMA功能把转变成的数字量搬到固定的寄存器里,方便之后的数学运算。
在完成输入信号的读取后,控制器要对张力采样的信号进行数字滤波,然后与用户设定的张力值作比较,通过PID调节,控制输出PWM波。利用定时器2采集到的时间量结合用户设定的滚轴直径和材料厚度等参数可以推算出材料的长度。当收卷筒收到用户需求时,如果开启满料报警,就可以提醒用户更换卷筒了;同理,放卷时可以开启少料报警。当测量的ADC数字量很小时,若开启了零张力报警,可以提醒用户工作异常。
程序在运行时,我们可以在FLASH里开辟一段存储空间,把用户设定好的参数保存在这里,每次开机时,就可以先从这段存储空间读取参数,这样系统就不仅可以准确运行,而且减少了很多设置麻烦。然而系统在运行时,也有可能会突然停电,这时必须可以保存卷径(收卷简或放卷简的直径),下次开机时卷径就不必从初始值计算。STM32带有可编程电压监测器,这里可以开启电压监测中断功能,这样就可以在掉电的瞬间利用片内空白FLASH储存当前卷径。下表1为张力控制过程中用户需设定的部分参数。
从宏观上,程序设置了3层页面。最上一层是工作页面,系统在正常运行时,处于该页面;第二层是参数选择页面,用户在这里选择需要修改的参数;第三层就是参数修改页面,用户可利用编码器修改参数的大小,编码器旋转的快慢对应着设定值变化的快慢,用户也在这里对系统进行调零和定标。由于张力传感器测量的是滚轴的重量和卷料的张力总和,而调零则是先测量滚轴的重量;定标则是利用已知重量的法码挂在滚轴上得到的信号量,如此,就可以准确测量出卷料的张力。
如图2所示,张力的控制过程可以分为四个阶段:预备阶段,启动阶段,运行阶段,停机阶段。t0以前为预备阶段,t0到t1为启动阶段,t1到t2为运行阶段,t2到t3为停机阶段,t3时间过后系统又重新进入了预备阶段,而T0为用户设定张力。用户可以通过设置表中的参数完成控制过程,预备阶段可以说是等待阶段,用户此时要把卷料准备好,而系统有一定的预备输出预热磁粉。在满足启动条件时,系统就进入了启动阶段,这里有两种启动方法,一是电平启动,即用户可以用开关开启系统;二是速度启动,即当滚轴速度达到一定值时,系统自行进入启动阶段,用户按需求设定的启动输出使设备开始运转。经过启动时间,系统就进入运行阶段,此时STM32控制器进行PID调节自动跟踪,当所测张力调节到设定值时,输出基本保持稳定状态。当卷材收取或放出完毕后,若是电平启动,则可以关闭开关停机系统,若是速度启动,则当速度降为设定值时自动停机。停机时的停机增益是指运行阶段输出值的增加倍数。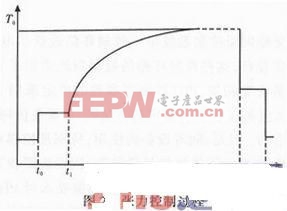
除了以上自动张力控制外,还有另一个控制方法,即可以人为给定输出值。人为给定输出值是只在特殊情况下才会用到。然而做作为输出的一种手段,也是必不可缺的功能。在张力控制过程中,也必须满足在手动和自动的切换过程中,不会对输出值有太大的变化,不然会至使卷料拉断或松弛,造成巨大的损失。
基于STM32闭环张力控制系统可以精确的控制张力,在印刷等轻工业中有着非常广阔的前景。它不仅在信号的采集时有较高的精度,在控制过程中也有极强的稳定性和可靠性。在配置参数时也非常灵活,可以满足多种用户的需求。在精度要求高的张力控制系统中,值得推广应用。
- 单片机的卷取机张力控制系统分析(11-25)
- 基于PLC和CC-Link现场总线的张力控制系统(09-12)
- 印刷机张力控制系统设计(09-09)
- 基于单片机的放卷机张力控制系统设计(08-31)