SOPC和ZigBee的三维移动天线平台设计
时间:10-08
来源:互联网
点击:
机控制。坐标值命令包含预定目标x、y坐标值,系统根据自身坐标(当前传感器值)计算得出电机控制寄存器值完成动作。系统软件流程图如图6所示。

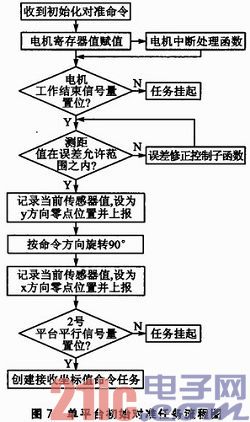
系统子任务中,水平初始对准任务和天线垂直调零任务最为重要。它不仅是移动平台位置初始化过程,更是系统建立空间坐标系的基础。因此,该任务实现的好坏,直接影响移动平台控制的可靠性。设计完善的应答机制,合理地使用信号量、标志组等,是任务设计合理可靠的关键。其简化流程图如图7所示。
3.1 ZigBee技术简介
ZigBee技术是一种应用于短距离、低传输数据速率下的各种电子设备之间的无线通信技术。我国目前可以使用的ISM(Industrial,Scien tific and Medical)频带为433MHz和2.4 GHz。ZigBee技术在我国工作在2.4 GHz频段,采用较高阶的QPSK调制技术,可以达到250 kb/s的速率,并减少工作时间,以降低功耗。在MAC层采用CSMA/CA方式,以提高系统兼容性。网络层方面,ZigBee联盟规定可以采用星形和网状拓扑。
ZigBee具有以下特性:功耗低、可靠性高、网络容量大、保密性高。
3.2 无线通信网络拓扑结构
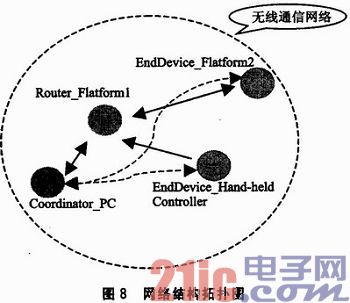
考虑到系统除测控计算机节点外,其余3个节点均为移动节点,移动范围在30 m左右,而手持控制器使用5号电池供电,功耗敏感。因此,设计采用簇状网络拓扑结构。即测控计算机为网络协调器,1号移动天线平台为路由器,2号移动天线平台和手持控制器为终端设备。手持控制器采用低频唤醒机制以延长电池使用寿命。网络拓扑图如图8所示。
针对双三维移动天线平台精确定位与控制,提出了一种切实可行的方案。经过实验验证,移动天线平台行进方向误差5 mm。天线水平极化和垂直极化误差0.2°。系统充分利用了SOPC技术优势,完成了两平台的综合控制和协调工作。证明了系统具有高精度、高可靠性、高集成等特点。
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)