基于单片机的医疗点滴输液控制系统设计
0 引言
目前医院普遍使用的是人工监控点滴输液装置器,将液体容器挂在一定高度,利用势差将液体输入病人体内,用软管夹对软管夹紧和放松控制滴速,医护人员按药剂特性对滴速进行控制。如何使这种手工操作走向自动化或半自动化,让护理人员监控病人打点滴的进程时间得到充分利用,使能自理的病人自己能掌握点滴的速度,这就要求医疗器械加速自动化与半自动化进程,提高医护质量。本文介绍了一种操作方便、显示直观、可集中控制、具有报警功能的智能型液体点滴速度监控系统。该系统可让医护人员在控制室(通过主机)改变不同受液者(控制从机)的输液状况,也可以直接到输液室直接改变输液状态(直接控制从机),了解病人的输液进程,及时通知处理将快完成的输液。
1 硬件结构与工作原理
1.1 系统框图
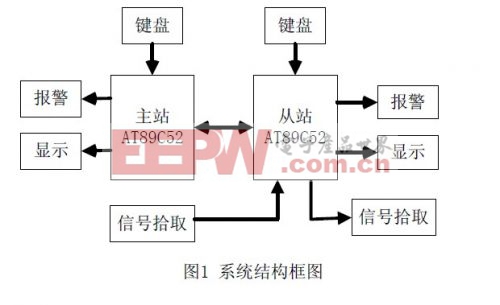
整个系统由主站和从站两部分组成。主站安装在护理室,主要功能是观察各从站的工作状态和相应的一些简单的控制功能,当从站的有特殊情况报警时,主站也同时报警,提醒护理工作人员进行相应的处理。从站安装在每个输液器上,以完成输液点数的设置、检测、控制和报警等功能。主、从站之间采用串口方式相连。因为从站个数较多,用AT89C52 自带的URAT 不易实现,为此在主、从站之间采用扩展的方式来完成通信功能,只要在从站中用一8 位寄存器就可完成256 个从站的控制。在AT89C52 上扩展扩展I2C 的方法可参见文献[1]。
1.2 主站硬件设计
如图2 所示,主站AT89C52 的P0 口接4×4 阵列式键盘,P1 口接八位LED 显示模块,P3.6 和P3.7 与从机的P3.6 和P3.7 对接,通过扩展I2C 总线串行通信,P3.0 作为报警控制端口,通过一4.7K 限流电阻接至三极管8050 的基极,由8050 驱动蜂鸣工作。八位共阴LED 用CD4511 七段译码驱动器驱动,74LS138 译码位选通;复位电路采用复位芯片MAX813L 以保证可靠复位。

液滴检测电路如图 4 所示,红外发射、接收电路装在滴管上,每一滴药水都将使检测电路产生一个正脉冲。单片机正是通过记录正脉冲个数来检测点滴的流速。液面检测电路如图5,由CD4609 构成的振荡电路产生38KHz 用于控制红外发射管发射,在正常情况下,J1(1380)输出高电平,单片机INT0 输入为高电平,当液面下降到设定高度(由红外发射管和J1 的安装位置决定)时,J1 的输出会有一个下降沿跳变,用于触发单片机的外部0 中断。
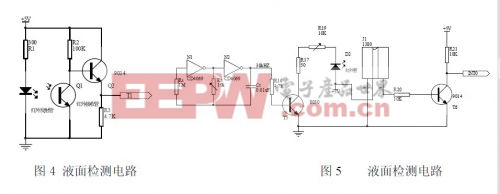
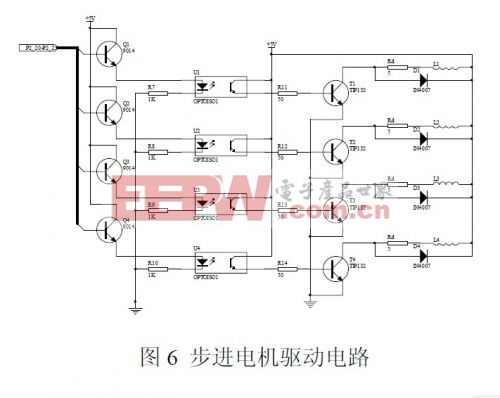
图 6 是步进电机的驱动电路。由P2.0~P2.3 经三极管控制光耦的输入,并由光耦输出控制步直电机各组线圈的通断时间,从而完成步进电机的步进数和正反转控制。
2.1 主站程序设计
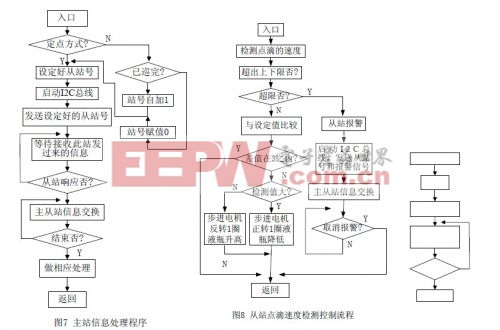
主站要完成的功能主要是对从站进行定点检测和巡回检测,并和从站通过I2C 总线进行数据交换,并对键盘进行扫描,根据键盘输入和I2C 总线进行数据交换结果进行相应的操作(如报警、LED 显示从站号和从站流速等)。主程序完成监测I2C 总线请求、键盘的扫描,并根据键盘的输入调用相应的功能程序实现其控制功能。LED 显示的可由T0 定时中断程序调用。键盘扫描和LED 显示程序的编写可参考文献[2]。主机信息处理程序流程如图7 所示,由键盘设定检测方式后调用此子程序。如设置的是定点方式,则由键盘输入从站号后启动I2C 总线,由I2C 总线进行信息交换后可得知从站的状态,并显示出来;如为巡回检测方式,每按一下键就检测一个从站,检完为止。
2. 2 从站程序设计
从站键盘扫描、LED显示、报警与I2C总线程序设计和主站类似,不同的主要有两点,一是要实现点滴速度检测、控制功能,二是要实现液面检测报警功能。点滴速度检测采用硬件定时和软件定时相结合的方式进行:每当T1有一脉冲信号,计数器自加1,并启动内部定时器T0计时,T0设置计时值为50毫秒,T0每一次中断都使一寄存器加一,这样可实现数百毫秒~数秒的定时,下滴到来时保留其值,并从新计时。以连续4滴的平均时间转换为每分钟的滴数作为控制依据。从站点滴速度检测控制程序流程如图9所示,并由主程序循环调用。当主程序调用此程序后,按如上原理检测点滴速度,如速度值太大或太小(和设定的极限值比较),从站报警,
并启动I2C总线将从站号和报警信号传到主站,主站接到信号后也报警。如速度值在允许范围内,则和护理人员设定的值比较,如相差在3滴之内,认为速度合适,不要调整,如超过3滴,则根据值的大小控制电机正转或反转一周,以调整滴瓶的高低,从而改变流速。主程序循环调用能将速度调整到设定范围内。液面检测电路输出作为外部中断0 的触发信号,中断0 的服务程序如图9 所示。当外部中断0 响应时,说明液面已低于设定值,
从站并启动I2C 总线将从站号和报警信号传送到主站,主站报警。
- FPGA的DSP性能揭秘(06-16)
- 基于单片机通用引脚的软件UART设计(10-16)
- 分时操作系统思想在单片机中的具体应用 (10-30)
- 基于AT89C51+DSP的双CPU伺服运动控制器的研究(05-26)
- 关于RTX51 TINY的分析与探讨(05-30)
- 基于MC9S12DGl28单片机的智能寻迹车设计(04-03)