GPS接收机的灵敏度分析
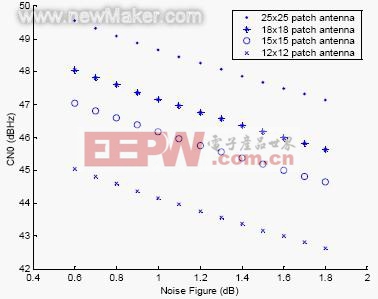
图 2 前级放大器噪声系数对载噪比的影响
此外,A/D 转换对性能的影响还和A/D 量化最大阈值和噪声的均方根(RMS)之间的比例有关。
接收机的热噪声基底为: 
常用的GPS 射频芯片中,A/D 量化和自动增益控制部分的电路都是联合设计的,根据A/D 量化阈值的要求设置自动增益控制的控制电平。
2.2 基带算法性能对灵敏度的影响
基带算法性能直接影响信号捕获、跟踪以及解调过程对载噪比的最低要求。GPS 信号是一个扩频系统,对于C/A 码而言,其扩频码为码长1023 的Gold 码,码速率为1.023Mcps,即每1ms 为一个C/A 码周期。因此,可以通过提高本地码和接收信号之间的积分时间来提高接收信号的载噪比。
积分方式分为相干累积和非相干累积。相干累积是指直接用本地码和接收信号按位相乘后再累加,而非相干累积则是对相干累积的结果再进行直接相加。
相干累积结果可根据下式进行计算([5]): 
信号载噪比,单位为dBHz, R(τ ) 为C/A 码的自相关函数, Δφ 为初始相位差, D为信号调制的导航电文符号, ηI 和ηQ 分别为I 路和Q 路的噪声。
由公式(6)(7)可知,相干累积结果和相干累积时长非常相关,相干累积时间越长,对输入载噪比的要求越低,其灵敏度也就越高,但累积时长过长,由于频偏Δf 的影响,上式中第一项值也会越小,又会降低其灵敏度。因此,一般高灵敏度的GPS 接收机都需要采用频率稳定度较高的TCXO 作为本振,以降低本地频率和载波频率之间的偏差。一般而言,高灵敏度的基带算法对本振的稳定度要求在8ppm 左右,该稳定度包括校正偏差、老化以及温度补偿稳定度,对于频率校正稳定度为2ppm、老化稳定度为5ppm 的TCXO 而言,一般要求其温度补偿稳定度在0.5ppm 以内。
非相干累积结果为 ,通过公式(6)(7)还可以看出,当采用非相干累积时,由于ηI 和ηQ的存在,其信噪比会比相干累积有所降低。
,通过公式(6)(7)还可以看出,当采用非相干累积时,由于ηI 和ηQ的存在,其信噪比会比相干累积有所降低。
下图给出了不同频率偏移情况下相干累积结果随相干时长变化的情况。由图中可以看出,当频偏较小的情况下,可以选择较长的相干时长以达到较高的相干累积结果。
图 3 相干时长与相干累积结果的关系
根据本文前述内容的分析可知,要设计高接收灵敏度的GPS 接收机,需要从以下几个方面着手:
1、 要有好的抗干扰和隔离设计,由于GPS 信号属于弱信号,信号强度在-130dBm左右,因此射频通道内任何一级引入的干扰都有可能极大地影响系统的接收信噪比,因此,需要从电路设计上做到抗干扰和隔离,尤其是地线的设计,差的地线设计可以使系统信噪比降低6dB 以上;
2、 需要最小化接收机噪声,即尽可能提高系统的G/T 值,这可以从尽量降低前级噪声系数、提高前级增益等方面进行,但同时还需要考虑系统的动态范围,全通道增益不能过大;
3、 要有好的基带算法,包括对信噪比要求极低的捕获、跟踪算法,这一点目前在业界很多GPS 基带芯片内都已经实现;
4、 需要高稳定度的本振,这也是好的基带算法能够工作的必要前提。
3 总结
随着GPS 应用范围的不断扩展,业界对GPS 接收机的灵敏度要求也越来越高。GPS 接收机的灵敏度主要受两个部分的限制:一是接收机前端电路包括天线部分的设计,二是接收机基带算法的设计。其中,接收机前端电路决定了接收信号到达基带部分时的信噪比,而基带算法则决定了解调、捕获、跟踪过程所能容忍的最小信噪比。本文针对上述两个方面的原理分别进行了阐述,并给出了高灵敏度接收机设计的建议。
参考文献
[1]. M. Braasch and F. van Graas, “Guidance accuracy considerations for realtime GPS interferometry,” in Proc. 4th Int. ech. Meeting Satellite Division of the Institute of Navigation, Sept. 1991, pp. 373–386.
[2]. P. Nieuwjaar, “GPS signal structure,” NATO AGARD Lecture Series No. 161, The NAVSTAR GPS System, Sept.1988.
[3]. Anonymous, Interface Control Document ICD-GPS-200, Arinc Research Corporation, Fountain Valley, CA, July1991.
[4]. Machael S. Braasch, A. J. Van Dierendonck, GPS Receiver Architectures and Measurements,Proceedings of The IEEE, Vol. 87, No. 1, January 1999
[5]. Bradford W. Parkinson, James J. Spilker Jr., Global Positioning System: Theory and Applications, Volume I, American Institute of Aeronautics and Astronautics, Inc., 1996(end)
- 基于GPS和GPRS的小型追踪器设计方案(05-20)
- 基于GPSOne技术的个人定位终端(07-30)
- 2010年中国(成都)电子展胜利闭幕(08-15)
- 基于DSP的车载GPS/DR组合导航系统硬件设计(09-13)
- ARM-Linux平台下GPS信号的采集与处理研究(07-25)
- 基于MiniGUI的GPS导航定位系统设计(02-20)