FlexRay为实现更高级的驾驶体验铺平了道路
时间:11-07
来源:互联网
点击:
在汽车电子或汽车总线领域,前端时间大家讨论最多的是LINK_KEYWORD0在宝马最新X5豪华SUV中的应用。FlexRay控制X5的自动驾驶系统,能够对随时变化的道路状况进行快速的反应并作出补偿。
在X5的底盘和悬挂控制系统中采用FlexRay似乎是个良好的开端。不过真正的用意在于为驾驶一族提供新一代的汽车控制总线,同时有助于获取实际应用中有关系统运行方面的更多信息。许多其他的汽车制造商也在期盼加快FlexRay总线的研发速度。
该总线的作用将会越来越突出。就像X5的自动驾驶系统一样,FlexRay总线的部署将会从某几个控制系统开始来取代CAN(控制器区域总线)总线。其他的FlexRay部署将能够实现一些CAN无法支持的新应用。在此期间,FlexRay总线将会和迄今为止仍是最重要的汽车总线CAN一起并存。而LIN(本地互联网络总线)总线将更适合于控制窗户和其他一些简单的功能,在短期内似乎也不会退出市场。
不过随着汽车变得愈加复杂以及更多系统的加入,往CAN和LIN总线无法提供的更复杂的控制总线过渡是毫无疑问的。
无论是对于安全还是性能,FlexRay很快就会显示其重要性。最终,它将会成为所有安全和驾驶性能的主要通信通道。这一技术革新的优点包括了降低制造成本和提高可靠性。
如果用更技术性的语言来表达,那就是未来汽车需要FlexRay提供的较高带宽(10 Mbits/s,而CAN的带宽仅为1 Mbit/s),而且其确定性协议能够确保对关键任务的超快速响应。
作为能够支持汽车线控(线控驾驶,线控刹车等)的技术,FlexRay显然能够将汽车性能提高到前所未有的水平。还有其他一些趋势也推动着它的普及,包括制造效率,安全法规以及消费者对便利性需求的增加等。
出于这些原因,在FlexRay中设计了10-Mbit/s带宽、内置的容错功能、还有确定性的协议。汽车技术中的每一个进展都是逐步演进的。因此FlexRay也能够适应多种网络拓扑结构-线性节点、无源星形、有源星形以及几种模式的组合。由于它具有可升级性,因此能够满足未来几十年可能出现的新技术挑战。
演进而非革命
汽车电子在定义驾驶体验中正起着越来越大的作用。从发动机管理开始,紧随其后的是汽车音响。如今,包括传动系、车身、底盘、辅助驾驶系统以及主动和被动安全系统在内的所有主要系统都实现了电子控制。
早在90年代初,人们就已经清楚地认识到,将这些系统组网到一起实现相互交互具有许多优点。CAN正是在那时推出的。
以前,每一个电子控制单元(ECU)都是一个独立自治的功能单位。随着ECU数量的不断增加,以及电子控制系统所能提供的技术能力的增强,发展趋势开始从组网到一起的ECU转向功能分散到多个ECU上实现的分布式系统。
但随着系统越来越复杂,人们又认识到车内网络不仅要提供更快速的数据传送,而且还必须提供确定性的和具备容错功能的通信链路。于是,唯一的发展之路就是先进的分布式控制系统。
FlexRay的研发始于2000年由下述四家公司创立的一个行业联盟,这四家公司分别是宝马、戴姆勒克莱斯勒、恩智浦(当时的飞利浦半导体 )和摩托罗拉SPS(即现在的飞思卡尔半导体公司)。在过去六年里,FlexRay联盟又增加了120多家公司。
从芯片开始应用FlexRay
在汽车中用芯片实现最新的FlexRay 2.1协议要求具有频率高达80MHz的32位微控制器的处理能力,这相当于英特尔早期的奔腾微处理器的处理能力。
此外,芯片需要使用多层总线—这是早期奔腾微处理器都不具备。
还需记住的是,FlexRay还要在未来与其他的汽车总线共存一段时间,于是当芯片用于网关设备时,它必须能够整合三种不同类型的通信控制器,即前面提到的FlexRay 2.1通信控制器,至少5个或6个CAN 2 控制器,以及多个LIN 2 主控制器。
FlexRay决非一个简单的协议。要成功实现这样的芯片设计,必须对其所控制的系统、这些系统所用的设备和环境都有深入的理解。而单从芯片设计的角度来看,也具有很高的复杂度。
在设计FlexRay控制器时,可用的架构方案有可能不止一个,而且在实现每项功能时也有许多选择。架构和设计的变化组合可能有许多种-但能够实现最好性能并具有最低成本的只有一种。
芯片性能的关键是控制器-主机接口。精密集成为芯片设计师提供了全新设计的机会,而无需再利用FlexRay独立控制器芯片上提供的接口。
通过设计能充分利用MCU固有优点的客户定制接口,例如ARM 9的多层系统总线,能够进一步提升系统性能和灵活度。这种架构还能确保较大范围的可升级性。
在X5的底盘和悬挂控制系统中采用FlexRay似乎是个良好的开端。不过真正的用意在于为驾驶一族提供新一代的汽车控制总线,同时有助于获取实际应用中有关系统运行方面的更多信息。许多其他的汽车制造商也在期盼加快FlexRay总线的研发速度。
该总线的作用将会越来越突出。就像X5的自动驾驶系统一样,FlexRay总线的部署将会从某几个控制系统开始来取代CAN(控制器区域总线)总线。其他的FlexRay部署将能够实现一些CAN无法支持的新应用。在此期间,FlexRay总线将会和迄今为止仍是最重要的汽车总线CAN一起并存。而LIN(本地互联网络总线)总线将更适合于控制窗户和其他一些简单的功能,在短期内似乎也不会退出市场。
不过随着汽车变得愈加复杂以及更多系统的加入,往CAN和LIN总线无法提供的更复杂的控制总线过渡是毫无疑问的。
无论是对于安全还是性能,FlexRay很快就会显示其重要性。最终,它将会成为所有安全和驾驶性能的主要通信通道。这一技术革新的优点包括了降低制造成本和提高可靠性。
如果用更技术性的语言来表达,那就是未来汽车需要FlexRay提供的较高带宽(10 Mbits/s,而CAN的带宽仅为1 Mbit/s),而且其确定性协议能够确保对关键任务的超快速响应。
作为能够支持汽车线控(线控驾驶,线控刹车等)的技术,FlexRay显然能够将汽车性能提高到前所未有的水平。还有其他一些趋势也推动着它的普及,包括制造效率,安全法规以及消费者对便利性需求的增加等。
出于这些原因,在FlexRay中设计了10-Mbit/s带宽、内置的容错功能、还有确定性的协议。汽车技术中的每一个进展都是逐步演进的。因此FlexRay也能够适应多种网络拓扑结构-线性节点、无源星形、有源星形以及几种模式的组合。由于它具有可升级性,因此能够满足未来几十年可能出现的新技术挑战。
演进而非革命
汽车电子在定义驾驶体验中正起着越来越大的作用。从发动机管理开始,紧随其后的是汽车音响。如今,包括传动系、车身、底盘、辅助驾驶系统以及主动和被动安全系统在内的所有主要系统都实现了电子控制。
早在90年代初,人们就已经清楚地认识到,将这些系统组网到一起实现相互交互具有许多优点。CAN正是在那时推出的。
以前,每一个电子控制单元(ECU)都是一个独立自治的功能单位。随着ECU数量的不断增加,以及电子控制系统所能提供的技术能力的增强,发展趋势开始从组网到一起的ECU转向功能分散到多个ECU上实现的分布式系统。
但随着系统越来越复杂,人们又认识到车内网络不仅要提供更快速的数据传送,而且还必须提供确定性的和具备容错功能的通信链路。于是,唯一的发展之路就是先进的分布式控制系统。
FlexRay的研发始于2000年由下述四家公司创立的一个行业联盟,这四家公司分别是宝马、戴姆勒克莱斯勒、恩智浦(当时的飞利浦半导体 )和摩托罗拉SPS(即现在的飞思卡尔半导体公司)。在过去六年里,FlexRay联盟又增加了120多家公司。
从芯片开始应用FlexRay
在汽车中用芯片实现最新的FlexRay 2.1协议要求具有频率高达80MHz的32位微控制器的处理能力,这相当于英特尔早期的奔腾微处理器的处理能力。
此外,芯片需要使用多层总线—这是早期奔腾微处理器都不具备。
还需记住的是,FlexRay还要在未来与其他的汽车总线共存一段时间,于是当芯片用于网关设备时,它必须能够整合三种不同类型的通信控制器,即前面提到的FlexRay 2.1通信控制器,至少5个或6个CAN 2 控制器,以及多个LIN 2 主控制器。
FlexRay决非一个简单的协议。要成功实现这样的芯片设计,必须对其所控制的系统、这些系统所用的设备和环境都有深入的理解。而单从芯片设计的角度来看,也具有很高的复杂度。
在设计FlexRay控制器时,可用的架构方案有可能不止一个,而且在实现每项功能时也有许多选择。架构和设计的变化组合可能有许多种-但能够实现最好性能并具有最低成本的只有一种。
芯片性能的关键是控制器-主机接口。精密集成为芯片设计师提供了全新设计的机会,而无需再利用FlexRay独立控制器芯片上提供的接口。
通过设计能充分利用MCU固有优点的客户定制接口,例如ARM 9的多层系统总线,能够进一步提升系统性能和灵活度。这种架构还能确保较大范围的可升级性。
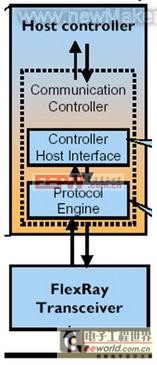
控制器-主机接口是FlexRay的关键性能预测器 协议引擎是通信功能中另外一个关键因素。FlexRay不是一个简单协
- 嵌入式DSP上实现FlexRay总线的方法(06-08)
- 基于μC/OS-Ⅱ的Flexray线控转向系统的实现(08-21)
- CAN/FlexRay总线开发平台解决方案(09-12)
- 基于Flexray总线的车载指挥控制设计与实现(11-17)
- ]基于Flexray总线的车载指挥控制任务计算机的设计与实现(08-28)
- 基于Flexray总线的车载指挥控制任务计算机的设计与实现(08-04)