是精密多圈线绕电位器,这样所有电阻功耗相等,温升也相等,而且其本身温度系数很小,只有±5ppm,所以其分压比固定不变,于是直流稳压器的输出电压不会变化,实测稳定度优于1×10-4,完全满足要求。

图2逆变电路
4.2逆变电路
逆变电路结构如图2所示:
逆变桥的三个桥臂驱动信号必须保证上下相互让开一定的时间,即死区时间。如果能在8031产生波形同时形成死区时间是最为理想,但这很难实现。为此我们采用硬件实现,见图3。每一路波形信号经延时、整形,其导通时间会缩短,就得到了死区时间T,这里T=100kΩ×15pF=1.5μs,实验证明这一方法简单有效。

图3死区时间形成电路
驱动电路采用美国IR公司的集成驱动芯片IR2110三片,电路简单可靠,输出驱动能力强,且具有过流保护功能。2110内部有电流比较器,当电流取样值超过设定值时,比较器输出翻转,将驱动信号锁死,逆变器没有输出,保护了电路免受破坏。
逆变器选用6只IRF540功率场效应管,IRF540内阻低、热阻小,很适合输出级使用。例如当输出电流0.2A时,其管压降只有15.4mV,功耗3mW,几乎可以忽略不计。
4.3单片机系统
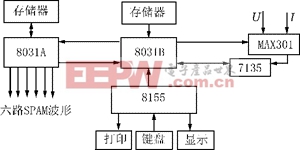
图4 过流保护电路框图
单片机系统分两部分,每一部分用一片8031控制:8031A只是用来产生SPWM波形,8031B完成键盘、显示、测功和计算、打印的功能。结构如图4。
系统要求输出的频率稳定性很高,因此单片机8031A专门用来发波形。波形是先离线计算好,每一种频率对应一组数据,包括输出电平为高为低以及脉冲的时间宽度,全存在存储器中。当收到8031B的起动命令和输出频率后,从存储器取出输出值送到IO口。同时,打开定时器,到设定时间后送新数。因此,电源输出频率的稳定度基本是由单片机的晶体振荡器稳定度决定的,而晶振的频率定度远远高过系统要求。
8031B扫描键盘,得到输入命令后,与8031A通信。在起动之后,实时检测母线电压和电流,实时计算,显示功率及其变化量,记录以备打印输出。这里主要是要求系统测出功率变化量,以此反映陀螺电机内部状态的变化量,所以对功率绝对值并无很高要求。取直流母线的电压和电流相乘计算功率。这个值基本与实际值相等,且省去了测功率因数。电流和电压经高精度模拟开关MAX301送入ICL7135进行A/D转换,ICL7135是4位半双积分A/D转换器。单片机从7135取出转换结果,进行乘法计算,得出结果。
5结束语
本文重点介绍了电源硬件,对软件未作叙述。综上所述,本系统有诸多特色,如双单片机,正弦脉宽调制,带开关稳压器的高精度直流可调电源等等。经长期使用,未出现任何问题,可靠性很高,因此本电源对精密陀螺的研制开发具有重大的意义。
|