采用PIC16F877单片机的汽车电动助力转向系统控制
个相同的N沟道IRFP250功率管来构成H桥电路。
FET 基极驱动电路选用MOSFET专用栅极集成电路IR2109作为核心模块,该芯片是一种单通道、栅极驱动、高压高速功率器件,采用高度集成的电平转换技术,大大简化了逻辑电路对功率器件的控制要求,上管采用外部自举电容上电,使驱动电源数目大大减少,控制了电路板的体积,降低了成本,提高了系统可靠性。
驱动电路如图3-2所示,两个IR2109的IN端为驱动H桥同臂上下两个功率管的信号脉冲输入端,分别通过具有高速性能的6N137光电耦合器接至PIC16F877单片机的两个PWM脉冲输出端口;两个SD端分别与单片机的一个I/O口相连,控制电机停车操作;每个芯片的HO和LO端分别与同桥臂的功率管相连,控制电机转速;VB端通过自举二极管UF1005与+12V 电源相连,为了阻断特殊电路中所承受的全部电压,此处选用具有超快恢复特性的二极管UF1005。

图3-2 电机驱动电路
3.5.2 电机电流采样电路
系统进行电流采样有两方面用途,一是为电动机提供保护;二是通过电流传感器反馈电枢电流的信号,以便对电枢电流进行闭环控制。标准电阻是一种常用的电流传感器,由于其简单可靠、阻值稳定、精度高、频响好、输出电压直接比例于所流过的电流,在 PWM 系统中应用相当广泛。标准电阻一般采用锰铜或硅锰铜制成。在采样电路中,选用AD626把采样信号放大10的n倍送至单片机相应端口,具体电路如图 3-3。
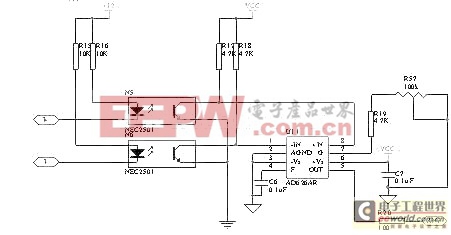
图3-3 电机电流采样电路
3.6 继电器控制电路
如下图3-4所示,CPU控制信号经CPU端口PSP0输出后,开关管 Q1导通并驱动功率三极管 Q12,使继电器通电并闭合节点,继电器节点闭合后可给电机、离合器供电。CPU输出的高低电平信号分别控制继电器的合开操作。
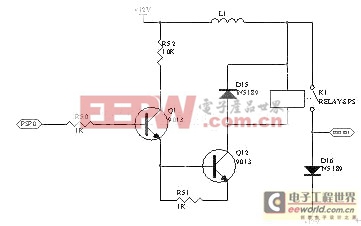
图3-4 继电器控制电路设计
4 结论
本文在对EPS系统的原理和助力控制过程的分析基础上,对 EPS 控制系统的硬件电路进行了研究设计,提出了采用受限单极性可逆PWM控制模式控制直流电机;探索了在汽车电动助力转向系统中,低压、低速、大电流永磁式无刷直流电机的控制方法。采用精密电阻进行电机电流采样的方法,实现了对直流电机输出扭矩的闭环控制。在完成了硬件电路设计和软件编程后,按照预定的助力特性曲线,对EPS系统进行了台架试验,试验结果表明:电子控制单元信号采集的实时性较高,对电机闭环控制的跟随性较好,整个系统具有良好的电动助力特性,硬件部分的抗干扰能力和可靠性都很高。
- pic16f877a的电平变化中断(interrupt on change)使用误区(12-03)
- 用单片机pic16f877a实现鼠标数据的采集(12-03)
- PIC16F877A一路舵机参数化控制程序(12-02)
- PIC16F877A与PC机串行通信C语言源程序(12-02)
- PIC16F877A和AVR的单片机的PWM输出程序(12-02)
- 基于PIC16F877单片机数码管显示矩阵键值(11-30)