基于ARM处理器的GPS移动设备设计
线程进行大量读写串口操作时,有可能使整个程序陷入缓慢的串口等待中去,因此一般都采用多线程来进行读写串口操作。 2.2 GPS数据处理 GPS数据处理模块的设计方案如图1所示。GPS接收模块通过串口2将定位数据(NMEA0183 Ver2.0)传给开发板,然后应用程序对数据进行处理。在VS2005中,直接利用串口通信方法将定位数据读入,接着进行定位数据的分类,并提取出所需要的信息,同时将这些有用的信息传给主应用程序,主应用程序再将GPS接收模块的控制信息整理成NEMA0183 VER2.0语句。 2.3 信号接收与处理 GPS接收到位置信号后,系统将对GPS的定位信息进行分解并提取出有用数据。GPS信号接收和处理的过程是:通过串口2将GPS输出的数据传递给开发板,开发板主程序获得目标当前的位置(经纬度坐标),将接收机获得的GPS数据进行分解,从中得到目标当前的位置和格林威治时间(该时间加上8小时即为我国标准时间),再将当前位置在经纬度数据库查询,获得当前的具体地点名。 经纬度随着开发板的移动是不断变化的,在控件显示时要设定一个TIMER来更新值,本程序设置的是1s,如果在实际应用中移动速度非常快的话可以把TIMER更新值设得更小。 2.4 人机界面设计 系统采用三星TFT显示屏,分辨率为420×272。人机界面基本功能包括串口选择控件、波特率选择控件、经纬度显示框、地点显示框、“搜星”按钮、“地点查询”按钮、文本框等,具体交互界面设计如图2所示。串口和波特率两个控件为串口选择和波特率的选择,其中串口选择控件提供串口l和串口2进行选择;波特率控件提供有三种设置,分别为4800、9600、19200。“搜星”按钮为打开对应串口,开始从GPS接收模块接收数据。“地点查询”按钮用来显示当地的实际地点名,当搜到星后,按这个按钮,通过查询经纬度数据库,就可以查到对应地名。最下面的文本框显示原始的数据流。 3 操作系统移植 WinCE 5.0操作系统的移植主要是基于硬件平台进行BSP开发。BSP是基于WinCE 5.0平台系统的主要部分,它主要由一些源文件和二进制文件组成,又称主板支持软件包,它是一个主要由包含启动程序(bootloader)、OEM适配层程序(OAL)相关硬件设备的驱动程序的软件包,另外还可以把上层的应用也放到BSP中。在BSP内部,通过OAL链接到系统核心,而驱动程序和系统配置文件是与OAL层相互关联来完成驱动设备和配置系统的功能。在BSP外部,我们可以看到一个建立在硬件平台上的主板支持包。在开发过程中可以利用开发板运营商提供的BSP包进行操作系统的定制,定制完成后固化到Nandflash中。 4 测试 因为开发板的串口2直接与GPS接收模块的串口相连,所以串口设置选择串口2。波特率应与GPS接收模块匹配,设置为4800。GPS模块为上电即启动,并且不能关闭,所以点击“搜星”按钮即可接收数据。启动“搜星”按钮后1min左右,就能显示正确的经纬度。点击“地点查询”按钮,能正确显示地点信息。最下面的文本框可以显示原始的数据流。测试时实拍的照片如图2所示。 5 总结 文章以VS2005为软件平台,利用基于ARM处理器的WinCE 5.0嵌入式开发平台和GPS接收模块,通过合理使用串口通信,实现了GPS数据信号的接收与解码,并利用触摸屏进行显示,已基本具备GPS移动设备的雏形。 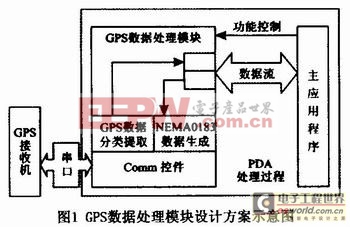

- 基于GPS和GPRS的小型追踪器设计方案(05-20)
- 基于GPSOne技术的个人定位终端(07-30)
- 2010年中国(成都)电子展胜利闭幕(08-15)
- 基于DSP的车载GPS/DR组合导航系统硬件设计(09-13)
- ARM-Linux平台下GPS信号的采集与处理研究(07-25)
- 基于MiniGUI的GPS导航定位系统设计(02-20)