一组PLC程序的逻辑错误分析

图8 程序修正图
这里用了两个定时器,当第一个定时器tim050到时之后,它的输出信号1送到第二个定时器tim051启动后者计时。但tim051需要5个单位之后才能到时,在这段时间内,tim050依然的输入依然是1,因此它能够把1继续保持0.5秒,由此产生一个均匀的每隔0.5秒变化的脉冲。
程序错误(2):在系统初始启动阶段,南北方向绿灯亮,但东西方向的左转红灯和直行红灯没有同时点亮
原因分析:由于相关程序比较长,不便在这里展示,这里我们仅分析一下出错的原因及解决的办法。原程序中采用顺序启动各个颜色灯的方法。即左转绿灯10秒后启动直行绿灯,30秒后绿闪,2秒后黄灯,然后55秒红灯。然而,按这一顺序运行时,一开始南北直行红灯的10秒缺掉了,东西左转红灯45秒漏了,最后东西直行红灯55秒也漏了。要改变这一情况,需要改变后一程序,同时再引入两个定时器,把红灯控制切分成两段完成。
可能人们认为上一个问题不算严重,因为原来程序在启动一分钟之后就能达到正常。但下面的强通控制的错误确是比较严重的。所谓强通是指紧急车辆到达路口时,人工控制按下相应方向的强通开关,使得这一方向的绿灯亮,另一方向亮红灯。紧急车辆过去之后,强通开关方块,强通方向绿灯闪动三下之后,恢复原来的系统运行。
程序错误(3):强通按钮放开之后,按规定强通方向绿灯应该闪烁三下,然后熄灭,但实际情况是绿灯没有按照规定闪烁和停止,而是持续发亮。
原因分析:
我们以东西向直行绿灯控制程序段为例分析这一问题。
该程序中100.12为控制东西向绿灯的输出变量。该方向的强通通过hr0.00控制,强通按钮按下之后,该变量为1,从而引起100.12输出为1,绿灯亮。强通按钮放开之后,这条通路切断,hr0.01变为0之后,hr0.03会变为1,过程在这里略去。hr0.03所在的通路将产生一个3秒钟的闪烁脉冲。编程者的意图是通过它在结束强通之后制造一个绿灯闪烁过程。然而,由于变量100.12的反馈存在,一旦该变量为1,它将自动地继续保持为1。只有两种方式可以使它恢复为0,一种是30秒定时器到时(tim010),另一个是另一方向的强通信号hr0.01。在同方向强通信号结束之后,一般情况下,上述两个信号均不会转为1,因此绿灯无法马上停止。系统并不产生规定的效果。
这是一个比较严重的错误,因为此处本应经过绿灯闪烁转为红灯,但系统却始终保持绿灯。这样的系统是无法接受的。
这一问题的解决比较复杂一点。由于我们的主要任务是发现错误,此地我们不再讨论如何修正这一错误的问题。
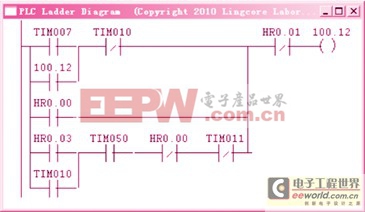
图9 东西向直行绿灯控制程序分析图
5 第二个十字路口交通灯控制程序
本节讨论另一本书上的交通灯控制程序中的错误。这一程序没有处理强通控制这样的复杂问题,但是人行道控制同主干道控制分开处理,结果在人行道控制上出现了错误。
题目:交通灯控制程序
来源:plc应用开发实用子程序
编程平台:西门子s7-200
时序控制:(90秒周期)
南北主干道 左转绿10秒,绿30秒,绿闪3秒,黄2秒,红45秒;
东西人行道:红13秒,绿27秒,绿闪3秒,红47秒;
东西主干道: 红45秒,左转绿10秒,绿30秒,绿闪3秒,黄2秒;
南北人行道:红58秒,绿27秒,绿闪3秒,红2秒。
注:
(1)绿闪包括转向绿灯和转向绿灯;
(2)东西人行道指东西两端的人行道。
测试显示该程序时序上运行正确,但是在关机时出了问题。
程序错误:按下系统停止开关,大部分灯都熄灭,但两个方向的人行道上亮起红灯。
程序分析:
我们以控制东西方向人行道红灯的变量q1.3的计算为例进行分析。下面把相关程序段专门抽出来进行分析(见图10)。

图10 相关程序段分析图
图中可见,当m0.4为0 时q1.3将输出1。当t7,t8为0时m0.4必定为0。系统停止开关是i0.2,它按下之后会使m0.1变为0,该变量是控制系统活动的主要变量,它变为0将使一系列变量变为0,也包括t7和t8。然而这样做却没有关掉东西两端人行道的红灯。南北两端人行道红灯采用的是类似程序,因此也没有关掉。
程序修正:
只需把m0.1直接加入到人行道红灯的控制中即可。
6 结束语
本文分析了来自两本plc教材的4个程序例子,从中找出大大小小8个错误,并对这些错误的原因进行了分析。我们希望这个分析能够帮助程序员减少编程错误。
本文目的是为了揭示plc程序错误的普遍性。这些错误不能简单归咎于作者的失误,主 要原因是编程模式的复杂性以及测试手段的缺乏。
失误是人类的普遍行为。对于计算机程序这样复杂的对象,出错经常出现。程序编制过程本身就是一个不断尝试不断纠正错误的过程。然而,在plc领域,离线的调试工具比较薄弱,迄今为止最好的调试方式依然是现场调试,但是这一方式过于耗费时间,而且一般教师和学生都没有这样的条件。这是程序错误率高的根本原因。
- 三菱PLC程序流程控制应用指令(12-19)
- PLC程序调试步骤(12-12)
- 基于闪烁存储器的TMS320VC5409 DSP并行引导装载方法(05-23)
- DSP外部Flash存储器在线编程的软硬件设计(07-10)
- 一种新型的多DSP红外实时图像处理系统设计(02-03)
- DSP与普通MCU的比较(02-23)