固定阈值在超声波测距车载中的应用
引言
在超声波测距车载应用中,例如:超声波泊车辅助 (UPA) 和盲点探测 (BSD) 等,系统发射的超声波被周围物体反射回来。系统接收反射波(回波),然后将物体的回波振幅与某个阈值比较,从而实现探测物体的目的。物体越靠近系统,其回波也越强。因此,阈值随时间而变化,是一种相对常见的情况。本文将向您论述,该阈值无需变化,可以保持固定不变。
超声波测距
小轿车中使用的高级驾驶员辅助系统 (ADAS) 便是一种超声波测距应用。安装在车载前后保险杠和后视镜上的超声波传感器发射出超声波,然后接收周围物体反射回来的超声波。超声波的传播时间(飞行时间)用于计算到物体的距离,从而帮助驾驶员泊车:寻找泊车点,或者探测驾驶员盲点区域内的物体。车载前后保险杠安装的传感器达到 4 个之多,另外,每个后视镜上还各装有一个传感器。
在超声波高级驾驶员辅助系统中,压电式传感器一般用于将电信号转换为超声波,然后再把反射回来的超声波转换为电信号。接受反射回波时,压电式超声波传感器的低接收机灵敏度通常会导致电信号非常微弱。
超声波接收机接收到的回波信号s(t)被噪声破坏。图 1 所示输入相关噪声η(t)为外部环境噪声和所有信号链组成部分的和,其与时间(t)相关。被破坏的信号 u(t) 经由放大器使用增益 K 放大,然后通过一个模数转换器 (ADC) 被数字化。数字化的 AM 信号经过一个带通滤波器 (BPF) 按线路传输。该滤波器主要用于改善信号的信噪比。把经滤波后的信号 y(t) 与阈值 L 比较,以探测某个物体的存在。BPF 的后面一般会有一个振幅解调器,其将信号转换为基带,以进行比较。但是,本文为了方便说明,我们忽略了这种解调器。因此,探测物体的关键是阈值 (L) 的选择。那么,我们如何选择 L 呢?
回波振幅
发射器产生的超声波为一系列载波频率下的正弦波脉冲,并以声压级 (SPL) 来描述。SPL 的计算方法如下:
其中,Prms 为 RMS 声压,而 pref 为基准声压。常用基准声压为 20 Pa,即 0.0002 bar.
传感器对某个物体产生的超声波 SPL,取决于物体到传感器的距离。特别需要请注意的是,声压同距离成反比例关系:
其中,p 为声波压力,而 d 为物体到传感器的距离。超声波传感器规范说明了30cm 距离的 SPL.由该值,利用这一距离定律,我们便可以计算出任意距离 x的 SPL:
其中,x 为传感器和物体之间的距离,并且 x > 30 cm.因此,x 距离的 SPL 为:
也就是说,超声波从传感器传播到物体过程中,会损失声压。
声波从物体反射回来,返回到传感器,声压进一步损失。另外,由于空气和物体都会吸收一部分声压,所接收回波的 SPL 可以通过方程式 3 进行近似计算。具体方程式请见本页末尾处,方程式中 α 为空气吸收系数。请注意,空气吸收的 SPL 与声波在空气中传播的距离与正比。换句话说,SPL 损失与 x 成正比。我们使用因数 2,是因为声波在传感器和物体之间传播两次-一次从传感器到物体,一次从物体到传感器。根据方程式 1,传感器接收的回波脉冲的声压计算方法如下:
超声波接收机将接收到的声波转换为电信号。转换过程受到接收机灵敏度 (dB)的影响。1 Pa 声压产生 10 V 时,接收机灵敏度为 0 dB.因此,利用方程式 5和 6,可以把以 dB 表示的接收机灵敏度转换为 V/Pa.
其中,增益(K)为一个常量。
方程式 8 表明,随着物体到传感器的距离 x 增加,回波电压下降。换句话说,物体越靠近,回波振幅变大,而物体远离时,回波振幅变小。
图 2 表明,接收到的电压与物体到传感器的距离有关,假设参数取值情况如下:
30cm 距离时发射 SPL= 106 dB
空气吸收=1.3 dB/m
物体吸收=0 dB
接收机灵敏度=–85 dB
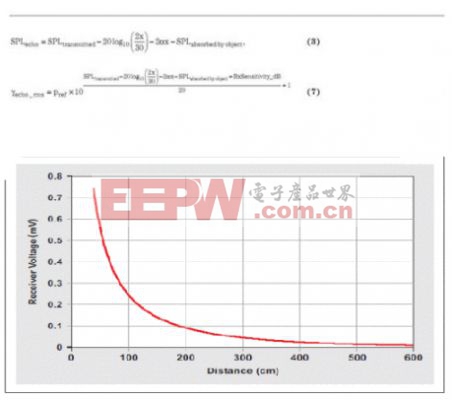
图 2 接收机电压为物体到传感器距离的函数
可变阈值方案
前一小节表明,从物体接收到的回波的振幅,会随物体到传感器的距离增加而减小。另外,由图1我们知道,回波处理路径的输入信号为u(t) = s(t) + η(t),其中s(t)为回波信号,而η(t)为输入相关噪声。换句话说,回波信号振幅不仅随距离增加而减小,并且会被噪声破坏,而回波处理系统只能通过处理回波信号来探测某个物体的存在。选择阈值时,一种常用的方法是阈值方案。使用这种方法时,阈值随时间而变化。特别是,超声波刚被发射出来时,阈值较大,之后,随着经过时间的增加而减小。这种方法的基本原理是,利用信号振幅的可预测衰变,确定阈值大小:越靠近物体,回波和阈值越大,从而实现物体探测。离物体越远,回波和阈值就越小。
尽管这种可变阈值方案方法原则上有效,但它存在两个缺点:
可变阈值方案要求器件内部有存储器,以将时间与阈值关系存储至方案表中。如果阈值有 3 个可能的取值(如图 3 所示),则该表就会有 6 种可能的输入。另外,对于车载中使用的高级驾驶员辅助系统 (ADAS) 来说,用户需要输入多种可能的传感器安装位置,因为传感器可以安装于车载保险杠或者后视镜上任何位置。例如,如果一个传感器有 10 个可能的安装位置,那么器件就需要存储多达 60 个位置数据。这就增加了器件的成本,因为要求使用更多的存储空间。
在车载保险杠和反视镜上安装好传感器后,系统制造厂商会“校准”方案表。校准过程就是确定各个阈值,以及切换阈值的时间。这种校准通常是一项耗时费钱的工作,特别是一个表中需要多个输入数据时更是这样。
总之,可变阈值方案的主要缺点是,它增加了超声波测距系统的总成本。
- 基于TMS320VC5509A的超声波电子笔设计(06-11)
- 基于MSP430单片机的超声波倒车雷达监测报警系统设计(08-14)
- 基于嵌入式Linux的倒车影音系统设计(09-08)
- 基于LPC2138和μC/OS II的超声波测距系统设计(01-14)
- 基于56F803DSP的大功率超声波电源的设计(05-27)
- 基于56F803型DSP的大功率超声波电源设计 (10-01)