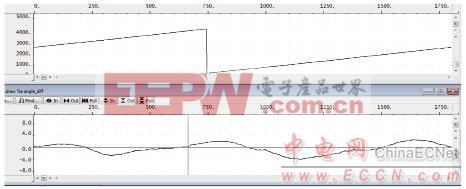
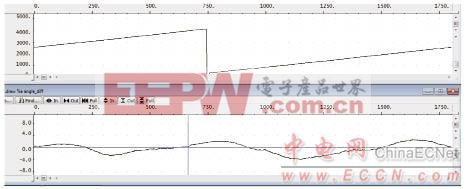
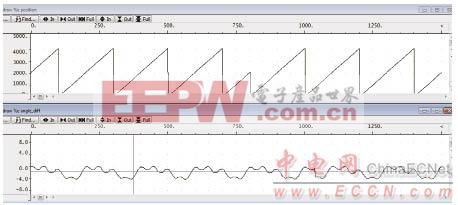
借助无传感器FOC控制方式实现电动汽车安全冗余功能
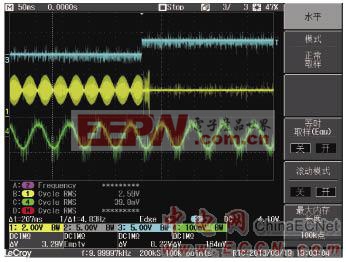
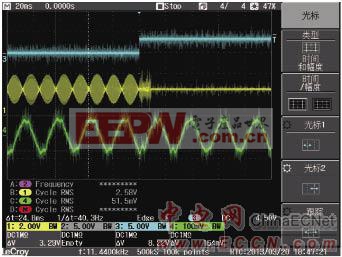
相电流和转子位置。解码后的位置数字信号通过TC1782的并口进行反溃最后,这些反馈信号由CPU进行处理,相应的调制信号通过GPTA输出端口进行输出。 图3 逆变器系统 表1 图4 测试电机 图5 电机转速102rpm, Vdc = 300v, Idc = 0.4A (顶部:来自旋转变压器的角度反馈;底部:角度误差) 图6 电机转速400rpm ,Vdc = 300v, Idc = 2.0A (顶端:来自旋转变压器的角度反馈;底部:角度误差) 图7 电机转速703rpm, Vdc = 300v,Idc = 3.2A (顶端:来自旋转变压器的角度反馈;底部:角度误差) 图8 电机转速1001rpm, Vdc = 300v,Idc = 5.5A (顶端:来自旋转变压器的角度反馈;底部:角度误差) 图9 切换至无传感器控制(电机转速300rpm, Vdc = 300v, Idc = 1.2A) 图10 切换至无传感器控制(电机转速800rpm, Vdc = 300v, Idc = 3.7A) 硬件测试平台 逆变器系统 测试是在英飞凌HybridPACK? 2逆变器模块和TC1782控制板上进行的(参见图3)。其开发目的旨在支持客户利用英飞凌HybridPACK? 2 IGBT模块进行初步应用设计。一个直流母线电容器和一个散热器被用来实现针对80kW (H)EV应用的完整主逆变器。 该逆变器的主要特点: -针对80kW (H)EV应用的完整主逆变器 -通过汽车应用认证的IGBT模块HybridPACK? 2 - 650V/800A IGBT 二极管芯片组 -通过汽车应用认证的驱动IC 1ED020I12-FA -基于无芯变压器技术 -高达1200V和2A驱动功能 - VCE sat 检测 -可使用不同的电机位置传感器接口:编码器、旋转变压器、GMR (巨磁电阻)或霍尔传感器 测试电机 两台相同型号的内嵌式PMSM电机通过转子轴进行机械连接。一台电机通过逆变器系统进行控制,另外一台作为发电机使用。发电机的三相交流输出被整流为直流,并与电阻箱进行连接,以耗散功率。通过这种方式,机械负荷可添加到第一台电机上。测试PMSM电机的参数参见表1: 电气参数(如相电阻和d/q轴电感)是通过特定方法进行测量的。这些参数对于无传感器控制方案的准确性至关重要。 测试结果和讨论 对提议的控制方案进行测试以验证两项功能:1.相对低速范围内转子角度估算的准确性;2. 旋转变压器反馈的故障检测功能,以保证无缝切换至无传感器控制模式。 在稳态工作模式下,电机在300V直流电压下利用无传感器算法运行在100rpm-1000rpm范围内。电气角度估算值与旋转变压器反馈信号之间的实时角度误差被Lauterbach调试器记录。下面的四幅图表明了不同负荷下电机转速为102rpm、400rpm、703rpm和 1001rpm时的角度误差。 在这些图中,顶部波形是数字形式的旋转变压器位置反馈信号:4096代表360度电气角度。底部显示的是电气角度误差。在图7和图8中,有明显的波形不连续性。这是因为调试器数据更新的不连续,而不是转子位置的突然跳变。 从这些图中,我们可以发现在低速下(如102rpm),角度误差范围在-4度到 +2.5度。在更高速度下,可取得更好的结果,误差范围在4度之内。这主要因为高速运行时反电动势幅值相应增大,从而获得分辨率。另一个因素是方程式4中计算出来的补偿角度。当电机低速运转时,这个角度非常重要。在本设计中,低通滤波器的转角速度为100rpm(=5Hz ,考虑到电机转子为3极对)。 从测试波形中,我们还可以发现角度误差中出现一次和二次谐波。这可能是因为相电流测量误差、逆变器的非线性和电机不平衡导致的。可针对这些因素进一步研究,以改进无传感器算法的准确性。 这个控制方案的另外一个关键特性是故障安全特性。为了验证软件的这个特性,当电机在高压下运行时,拔下旋转变压器信号线。图9显示了电机转速300rpm(Vdc=300v和Idc=1.2A)的测试情况。图10显示了电机转速800rpm(Vdc=300v和Idc=3.7A)的测试情况。电机的相电流(绿色)和旋变输出的正弦信号(黄色)波形利用示波器进行采集。IO(蓝色)被用来指示从用旋变反馈角度的控制向无传感器控制的切换时刻。 从切换点开始,来自旋转变压器的正弦反馈不再正常,因为电缆被拔下。软件检测到旋变解码芯片的障或位置反馈信号的巨大跳变。无传感器算法可立即接替控制工作。我们可以发现在300rpm测试案例下,相电流波形在切换前后非常一致。对于800rpm测试案例,相电流在一个周期后恢复稳定。 结论 本文介绍了针对EV应用内嵌式PMSM电机的无传感器FOC控制,这种控制方式可作为故障安全策略使用。整个软件控制算法是在英飞凌Tricore? 32位 MCU TC1782上运行的。该控制方案在内嵌式PMSM电机和HybridPACK? 2逆变器平台上进行了测试和验证。测试结果证明了两点:估算角度的准确性可接受,冗余路径可作为故障安全策略


- 无传感器FOC控制提高电器电机控制设计(12-13)
- 基于PSoC?4 的PMSM无传感器矢量控制(09-23)
- 掌握驱动算法,玩转电机驱动(08-02)
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)