一种基于GPS/北斗卫星技术的车辆调度系统的设计
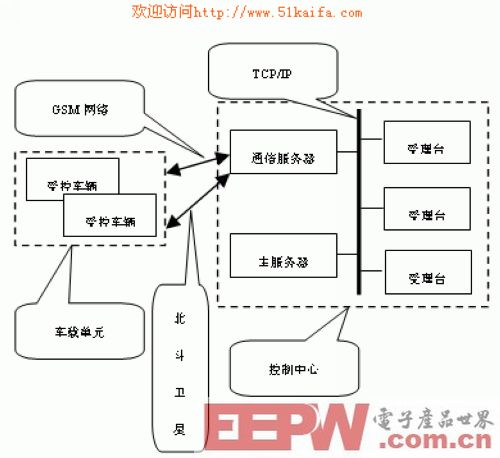
在能接收到GSM信号时,车载单元的信息(位置以及其他请求服务信息)通过GSM网络传递GPS定位信息和发送消息;在接收不到GSM信号时,利用“北斗”系统的定位通信功能,安装在移动目标上的北斗用户机通过卫星向定位总站发出定位申请,定位总站根据所收到的两颗卫星信号,计算出目标位置的经度和纬度,并通过卫星传回到用户机,用户机得到位置信息,同时,该用户机所属的指挥机也得到该位置信息。指挥机把该位置信息直接传输到与之相连的定位数据服务器、GIS服务器,在电子地图上显示该车辆位置。监控中心人员根据直观的图文信息对车辆实施有效的调度和监控,通过以上过程完成从移动车辆到用户指挥控制中心的数据通信。
3.3 控制中心介绍
本系统采取主控制中心+受理台相结合的C/S结构联合控制的工作模式。主控制中心由数据库子系统、通信子系统、呼叫受理子系统组成;受理台包括通信子系统、GIS子系统主控制中心和各受理台通过专线组成计算机网络,互相交换数据、共享信息,实现群体调度、联网报警、绝对保证安全的高要求。
控制中心结构如图2所示。
?
?
图2 控制中心结构框图
3.4 系统主要功能
车辆跟踪监视:
对行驶中的车辆的位置(包括经度、纬度)进行跟踪监视,将车辆运行位置形象直观地显示在监测区域的电子地图上。定位间隔时间可以自主设定。
指挥调度:
监控中心可通过车载设备的通话手柄,对车辆实施语音或数字指挥调度。
报警受理:
当车辆报警时,监控中心将收到声光报警的提示,同时对报警车辆进行屏幕自动跟踪,显示以报警车为中心的距离标识,根据车辆档案库,显示报警车辆的各种参数,如编号、车型、车牌、颜色、车主等等。
车辆控制:
采取相关技术措施,在车辆被窃确后,监控中心可通过遥控使车辆断电等方式使车辆不能行驶,也可让该车发出声光求救信号。
车辆管理:
结合车辆位置信息和状态信息,可对车辆及驾驶人员的工作状况进行有效的记录和统计。
数据报表输出:
每日、每月的报警表格记录输出,报警地点地图,用户使用情况报表、登录注销表输出。监控中心可查阅车辆每天的登录或注销信息,也可查阅车辆档案,并能打印输出每日的监控报表。
车辆轨迹回放:
监控中心可随时回放受控车辆以往的行驶路线。
网络管理:
主控制中心与受理台的网络管理。
信息调配:
控制中心拥有全部用户的资料,及全部服务区域的地理信息,辅助信息,可对全网系统资源进行调度,对同时实现各种跟踪的用户数在各用户监控中心之间进行调配。
4 系统软件设计
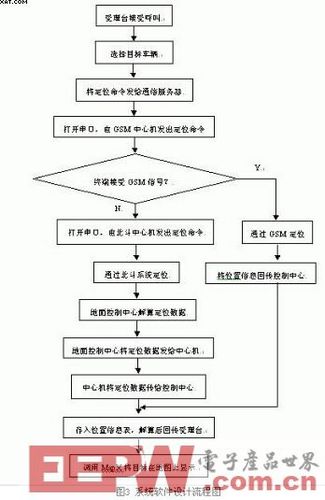
软件系统的主要模块有目标定位调度、数据传输、轨迹回放、移动目标基本信息管理等。该系统采用了C/S结构,利用Windows Sockets、大型数据库、TCP/IP网络和MapX等技术,实现了“北斗”系统与GPS的融合,扩大了应用范围。其软件流程图如图3所示。
在系统软件设计中,我们使用了一些主流的技术,使得我们的系统是一个开放的系统,在兼容性和扩展性上都做了充分的考虑。在网络的数据传输的实现上我们主要采用了Windows Sockets技术,采用现在十分流行的TCP/IP协议来传递数据。在GIS系统设计上,使用MapInfo制作电子地图并调用了MapX二次开发工具完成电子地图的各项操作。在访问数据库方面,我们采用的是微软ODBC标准下的ADO数据接口对数据库进行访问。
5 数据库管理设计
在考虑到系统的性能价格比的前提下,经过论证,采用MS SQLSERVER2000数据库。系统数据库包括GIS数据库,系统数据库。根据使用者登录信息操作不同的权限,设置普通操作员等级、指挥人员等级、系统管理人员等级、系统维护人员等级等多重等级身份,对于不同等级的使用人员可以有不同的使用权限。
GIS数据库存放的是地理信息,包括地图信息及其空间关系;系统数据库包括定位信息表,车辆信息表,通信信息表,车辆状态信息表,异常信息表。
?
?
6 结束语
本系统建立了一个以“北斗”为定位通信手段、功能完备的移动目标调度系统,能够对移动目标实时有效的定位、跟踪、通信、指挥、调度管理,实现了“北斗”系统与GPS的融合,扩大了移动目标调度系统调度范围;充分应用了北斗卫星系统定位通信功能,使移动目标调度系统的调度导航、通信集成一体,提高了系统整体集成度,方便了调度中心对移动目标的调度管理。
当今的移动目标调度系统的定位部分都是基于美国的GPS或俄罗斯的GLONASS,基于我国主研制的北斗卫星导航系统的移动目标调度系统基本没有。通过充分借鉴以往经验,本文所建立的车辆调度系统考虑到了“北斗”系统的特殊性以及移动目标车辆调度时所需功能。该
- 北斗二代导航接收机的卫星导航系统设计(10-10)
- 基于北斗二代的飞机除冰车定位系统设计(10-08)
- 基于ARM的北斗导航 GPRS GIS车辆监控系统设计(09-06)
- 北斗商业化震荡导航产业链:手机地图战况激烈(02-06)
- 北斗导航技术未来将给车载导航产业带来变革(07-03)
- 基于北斗二代系统的嵌入式船用导航仪硬件设计(06-25)