北斗二代导航接收机的卫星导航系统设计
摘要:采用以通用微处理器S3C2440为核心的硬件平台和以嵌入式Linux系统为核心的软件平台,最终完成了北斗导航终端的设计,并通过GPRS芯片实现数据的远程传输。详细给出了系统的硬件体系结构,重点介绍了与导航相关的应用程序以及流程设计。对于研究北斗二代接收机以及北斗导航系统的民用化具有一定的意义。
关键词:北斗二代;S3C2440;Linux;嵌入式;UM220
引言
北斗卫星导航系统是中国自行研制的全球卫星定位与通信系统,系统由空间端、地面端和用户端组成,可在全球范围内全天候、全天时为各类用户提供高精度、高可靠定位、导航、授时服务,并具短报文通信能力。2012年12月27日,北斗系统空间信号接口控制文件正式版正式公布,北斗导航业务正式对亚太地区提供无源定位、导航、授时服务。北斗卫星导航系统同时具备定位与通信功能,相对于GPS有自己独到的优势,但在民用领域的应用很不充分,GPS在民用市场占据绝大部分的份额。北斗导航系统在民用领域有着良好的前景,影响、制约北斗系统在民用领域获得广泛应用的主要因素就是系统用户终端。鉴于以上原因,本文设计了一种基于嵌入式系统的北斗定位终端。
由于ARM芯片具有性能高、价格低、功耗低等特点,在嵌入式领域得到越来越广泛的应用,本系统采用基于ARM架构的S3C2440微控制器负责整个系统的控制。北斗模块采用和芯星通科技有限公司的UM220导航/授时模块,负责导航电文的解码和信号处理,同时将卫星定位技术与GPRS/GSM移动通信技术相结合,完成了设备的短信息通信功能。
1 系统总体设计
按照系统功能要求,可将系统硬件整体架构分为以下5个部分,即中央处理器控制模块、UM220北斗接收模块、GPRS/GSM模块、存储系统、电源模块以及人机交互模块,如图1所示。
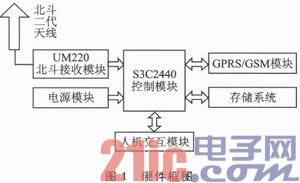
CPU处理器与存储系统是指以S3C2440为微处理器核心,以SDRAM为动态随机存储器,以NAND Flash闪存为外存的基本子系统。电源系统提供CPU、存储器以及外围设备高质量稳定电源。导航接收系统由北斗二代天线、北斗接收模块UM220组成。
通常情况下,北斗接收模块通过天线接收北斗卫星发送的射频信号,经放大、相关、混频等一系列处理后,解译出北斗卫星所发送的导航电文,S3C2440控制模块从导航电文中进一步解析出纬度、精度、速度、时间等定位信息,并存储、显示。系统用户同时可以将需要发送的定位信息进行格式封装,然后将定位信息发送给其他用户。
2 系统硬件体系
2.1 北斗接收系统
北斗信号接收系统的核心是UM220模块,具有尺寸小、重量轻、超低功耗(仅350 mW)的特点,能够同时支持BD2B1、GPS L1两个频点。UM 220外形尺寸紧凑,采用SMT焊盘,支持标准取放及回流焊接全自动化集成,尤其适用于低成本、低功耗领域。UM220无需外接CPU即可直接输出NMEA数据,并且支持UART等多种接口。
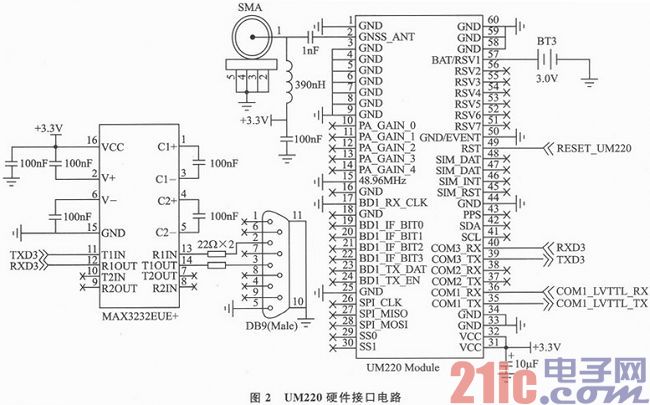
UM220模块主要由RF前端、数字中频滤波、微处理器、存储单元等组成,上电完成初始自检后,自动接收来自天线的北斗射频信号,经变频、放大、相关、混频等一系列处理后,完成并行通道对其视界内几何位置最佳的数颗卫星的连续跟踪,并测出信号从卫星到接收天线的传播时间,解译出北斗卫星所发送的导航电文,最后由串口输出NMEA-0183数据。UM220硬件接口电路如图2所示。UM220的串口引脚通过MAX3232电平转换芯片与S3C2440的串口连接,使其接收RMC模式下NAME格式的北斗定位数据。
2.2 无线数据传输模块
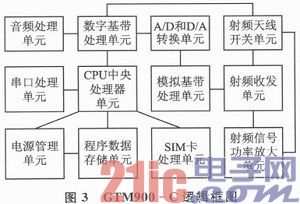
华为GTM900-C是一款两频段GSM/GPRS无线模块。它支持标准的AT命令及增强AT命令,提供丰富的语音和数据业务等功能,是高速数据传输等各种应用的理想解决方案。S3C2440作为一种32位高性能、低成本、低功耗的嵌入式RISC微处理器,广泛应用于通信系统、消费类电子产品、工业控制等产品中。S3C2440通过RS232控制GTM900-C,对于那些需要将远程数据通过已有的GSM网络发送到网路中去,实现网络化功能。GTM-900C逻辑框图如图3所示。
3 系统的软件实现
3.1 系统的软件平台
嵌入式操作系统是嵌入式系统的重要组成部分,它为应用程序的开发提供了一个软件平台。实现嵌入式系统的第一步就是进行系统移植,其中包括操作系统内核、文件系统和各设备驱动程序的移植。
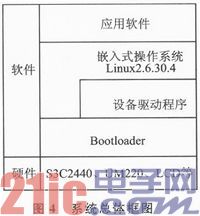
本系统中采用Linux-2.6.30.4内核,只需要对各功能模块进行裁剪即可。嵌入式系统一般采用Flash作为存储介质,Flash具有独特的物理特性,必须使用专门的嵌入式文件系统,本系统采用yaffs2文件系统。图4是系统总体框图。
3.2 软件体系结构
在本系统中,需要解算北斗数据、数据存储、传送等。整个系统的软件由主控模块、北斗定位模块、GPRS通信模块、LCD显示模块和串口操作模块5部分组成,如图5所示。
- 基于北斗二代的飞机除冰车定位系统设计(10-08)
- 一种基于GPS/北斗卫星技术的车辆调度系统的设计(03-09)
- 基于ARM的北斗导航 GPRS GIS车辆监控系统设计(09-06)
- 北斗商业化震荡导航产业链:手机地图战况激烈(02-06)
- 北斗导航技术未来将给车载导航产业带来变革(07-03)
- 基于北斗二代系统的嵌入式船用导航仪硬件设计(06-25)