关于GPIO实现RS485/422通信的研究
1.引言
工程实践中,对于解决同一个问题,我们常面临两种选择:要么硬件简单软件复杂,要么软件复杂硬件简单。如某引信系统的DSP电路,需要与内部两个组部件以及外部多个系统进行接口或者信息交互,且总体要求采用异步串口方式进行通信。此类问题主要有三种解决方案:第一,在DSP的并行总线上扩展UART芯片,通过硬件转换实现,软件最简单;第二,在DSP的McBSP串行总线上扩展UART芯片,软件有一定的复杂度;第三,不扩展其他硬件直接利用IO引脚通过软件控制实现,该方法软件最复杂。根据以往文献可知在硬件资源允许的前提下,前两种方法已经得到了广泛的研究。
然而在产品的研制过程中,常出现引信硬件资源紧张的情况,无法扩展满足需求的UART,只能选择第三种解决方式,总体的高波特率和高可靠性要求增加软件设计的难度。笔者通过软件的合理设计,成功地解决了以上问题。
2.串行通信基本原理
串行通信的基本原理是以改变数字电平的方式将数据按照一定的时间宽度(波特率)按位(通常低位在前高位在后)顺序传输,分为同步串口和异步串口两类。同步串口通信主要应用于传输速率高但传输距离要求不高的场合,异步串口则侧重于传输速率要求稍低的情形。
图1给出了异步串行通信的数据基本格式,对于一个完整的字节,传输时包含起始位、数据位、校验位。

实现同步串口通信通常需要6根总线,即收、发数据线,收、发帧同步线,收、发位时钟线。而异步串口则最少可只需2条总线(最多4条)便实现数据通信,如果采用差分传输还可以有效地提高传输距离,根据能否同时收发数据又分为全双工和半双工两种工作模式。
图2是应用最普遍的串口形式之一的RS485/422串口总线,RS485半双工传输采用一对差分信号,由主控端的RE和DE来控制当前数据收发,收发不能同时进行;RS422全双工传输采用两对差分信号,主控端直接独立收发,且收发可同时进行。

本研究通过软件控制改变GPIO端口的状态,完成RS485/422串口通信的时序。
3.基本流程设计
为提高软件的质量和可维护性,收发通讯实现时均采用位、字节和帧三个处理层次。每层相对独立,低层处理的结果通过状态传递方式通知上一层。
研究中采用的数据传输格式:1bit起始位“0”,8bit数据位(先低后高),无校验位,1bit停止位“1”,每个字节累计为10bit.
3.1 发送通信流程
主动发送数据形式的流程如下:
1)底层:位发送。在波特率控制的时间间隔内将发送数据管脚置为和当前bit一致的电平状态。
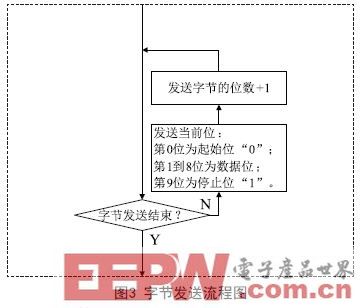
2)中间层:字节发送,如图3所示。发送当前bit,发送完位计数器+1,如果位数达到10位,则当前字节发送结束,并通知顶层;3)顶层:帧发送,如图4所示。首先检测串口当前状态是否为发送允许,如果不是则将串口置为接收禁止、发送允许状态,确定了发送允许后进入帧发送。帧发送按照报文格式顺序发送各字节,发送结束将串口设为发送禁止、接收允许状态。

3.2 接收通信流程
接收通信需要把每一个bit的数据准确地检测出来,确定字节的起止位,判断帧的起止字节,也就是说通过分析和计算将数据格式和通信协议所规定的每一个细节精确定位。对于帧起始时刻的判断,根据图1数据格式知在数据传输的过程中,即使数据位为全“1”或全“0”,由于有起始位和停止位的存在,也不会出现连续10个bit的“1”或“0”的情况,于是当连续出现10个bit的“1”时,则数据线处于停止传输的状态;而连续出现10个bit的“0”时,则数据线处于异常状态。于是接收通信开始后至少连续10个bit的“1”之后的“0”可以作为帧的起始位。这里的“帧”不是指通信协议中的完整报文,只是指收到的一段数据,至于当前字节是否为报文头,则需根据协议判断。好处是不漏任何数据,可靠接收约定报文。
接收通信流程如下:
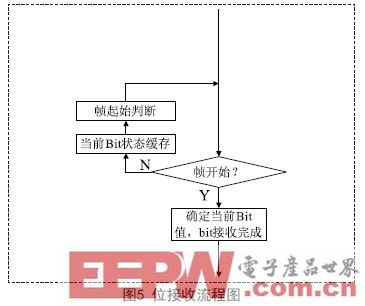
1)底层:位接收,如图5所示。位接收在由波特率确定的时间间隔到达时,采样接收数据线的电平状态作为当前bit值,同时判断帧起始位,帧开始后的位接收完成,通知中间层进行字节处理。
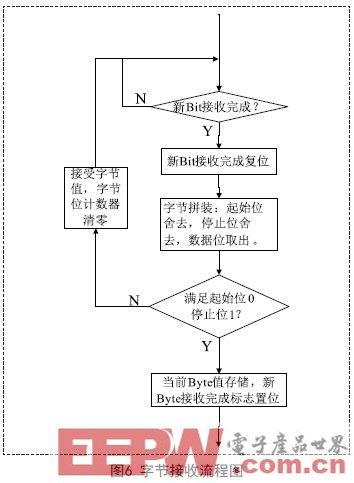
2)中间层:字节接收,如图6所示。当新bit接收完成时,将当前Bit值按照格式组合到字节数据。当字节位计数器满一个字节时,如果满足起始位“0”和停止位“1”的条件,字节接收完成,并通知顶层进行帧接收控制,否则字节无效。
3)顶层:帧接收,如图7所示。首先检测串口当前状态是否为接收允许,如果不是则将串口置为接收允许、发送禁止状态,在确任接收允许
- 基于SLH89F5162的智能清洁机器人(03-03)
- 最简单IO驱动的智慧(06-02)
- 单片机GPIO输入电压不可过大,最好使能上拉(09-25)
- stm8s开发(二) GPIO的使用:点亮LED!(09-13)
- 基于CPLD的QWERTY键盘设计(06-05)
- ARM7单片机(学习ing)—(一)、输入/输出端口GPIO编程—01(05-02)