基于AVR和GPRS的远程水情监控系统设计
的通信系统中选用了半双工无线通信模块作为网络的物理层结构,自主开发了适宜于数据传输的通信协议,实现了一站多点测试功能。
2)低功耗原则
考虑监控系统野外使用环境,测控节点的能耗必须尽量减少。由于水情信息大部分属于慢变化类型,传输的数据量又很少,而通信设备往往耗电很大,故可以仅当需要其工作时才予以供电,工作结束后立即切断电源。因此测控模块应具备休眠功能设计,在不采集数据和通信时可以下电,尽量降低测控模块的功耗。
3)可扩展性原则
为实现系统灵活扩展性应采用模块化设计方法,复杂的功能依靠若干模块的组合来完成,每个模块仅具有简单的功能。传感器接口和通信接口扩展能力是最主要的两个指标,可以通过增加串行接口实现。在具体设计电路时也应该留有余地,便于以后修改。
4)经济性原则
在满足功能需求的前提下,系统越简单,价格也越便宜。一个好的测控模块或监控终端在经济上一定要是最合理的,而不一定是最先进最复杂的。因此设计时要考虑性价比,功能模板的MCU应选用通用型号以满足经济性的要求,元器件的选型也应兼顾可靠性同时兼顾经济性。
4 系统结构总体设计
考虑到系统的工作环境以及用于采集水位、雨量和闸位等信息的传感器距离都不远,容易置于同一无线节点的辐射区域内。因此从实际应用出发,系统采用点对多点的系统结构。系统由3部分组成:上位机、监控终端(主节点)和现场测控模块(从节点)。系统基本组成如图1所示。
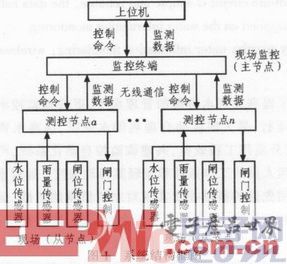
上位机负责连接各个监控终端,并将由管理员设置的各种采集命令转化为监控终端可以接受的形式发送至监控终端,并能识别由监控终端传来的响应信号,如果是数据,将数据发送给入库处理部分;如果是响应报文,就将其传送给界面处理部分。同时该部分还需要记录操作日志,对管理员进行的各项操作以及采集过程中发生的各种异常事件进行记录,供管理员以后查询。
监控终端主要负责定时与中心站进行连接,并能识别其传来的各种命令,根据命令进行响应操作。如果是数据采集命令,将数据封装成规定格式,发送给上位机;如果是操作命令,就进行相应操作,在操作完成之后,并将操作的结果返回给上位机。
测控模块负责识别各类传感器的信号,采集并将其转换为系统所需要的数据形式,并能临时存储。同时根据本系统设计的通信协议,接收监控终端发来的命令,完成数据传输或闸门电路启闭控制。
5 系统关键设备的硬件设计
本系统是软硬件的综合体,设计中注重软硬件的功能分配。系统中的关键设备是指现场测控模块(从节点)和监控终端(主节点),主要包含数据采集单元、闸门控制电路、电源、无线收发单元以及其它外围电路。系统采用分层的设计结构,底层控制电路由AVR单片机负责,主要实现对从节点以及闸门启闭电路的控制,并负责与上位机进行通讯。根据各部分的功能要求。
5.1 从节点硬件设计
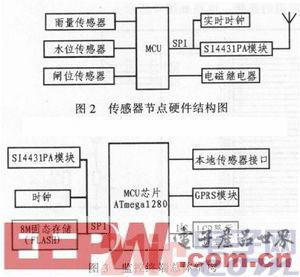
从节点主要包括4个部分:数据采集单元(传感器)、控制单元(继电器电路)、数据传输单元(SI4431PA)和实时时钟,如图2所示。
5.1.1 数据采集单元
传感器作为信息采集的主力军,担任着对水情和闸位多方面的参数测量。主要的传感器有水位计、雨量计和闸位传感器。测点的环境一般情况下很恶劣,传感器会被暴露在水中或大气中,因此必须能够有很强的环境适应能力和易维护特性。
1)雨量传感器
系统选用DY1090A型翻斗式雨量计,主要由简身、底座和内部翻斗3部分构成。雨量分辨率为1 mm,测量准确度为±3%,触点接触次数可达107次。工作原理为:降水进入筒身上部的承雨口首先经过防虫网过滤并清除污物,接着进入翻斗。当翻斗内的水量达到规定量时,翻斗立即自行翻转。在翻斗翻转过程中,磁钢和干簧管会发生相对运动,从而使得干簧管接点处的状态改变,输出电信号。输出的是干簧管机械接触的通断状态,接出的两根连接线组成开关量输出。干簧管通断信号一次代表翻斗翻转一次,即代表一个分辨率的雨量。雨量传感器本身输出为开关信号,连接至单片的引脚,利用计数器统计低电平次数,当然在每次读取后应及时复位该芯片。翻斗式雨量计本身是无需电源供电便能工作的,由于在使用时要产生、处理和接收信号,因此仍需外部电源,但是可以跟系统其它设备共用电源。
2)水位/闸位传感器
进行水位自动测量时,传统的用于人工观读的水尺和浮子式自记水位计已不能胜任,因为它们的水位输出不能接入自动化测量设备。现有的遥测水位计的感应方式主要有浮子式、压力式或是非接触式等。本系统选用南京水利水文自动化研究所研制的WFH-2型水位传感器。WFH-2型水位计水
- Flash损耗均衡的嵌入式文件系统设计(06-01)
- 锁相环控制及初始化简析(08-27)
- 基于AVR单片机的ISP1362OTG设计(09-06)
- 基于AVR单片机的串口转FSK的通信模块设计(01-23)
- 案例分析:基于AVR32的隧道环境监测系统(03-18)
- 科技帮我们远离灾难:灾难检测飞行器(03-18)