一款基于STM32的运动控制卡设计
时间:04-02
来源:互联网
点击:
关系很直观,最终也会起到影响Ke和Kec的作用,选择在线自调整Ku值能够起到良好的效果,不至系统过于复杂而影响实时性。
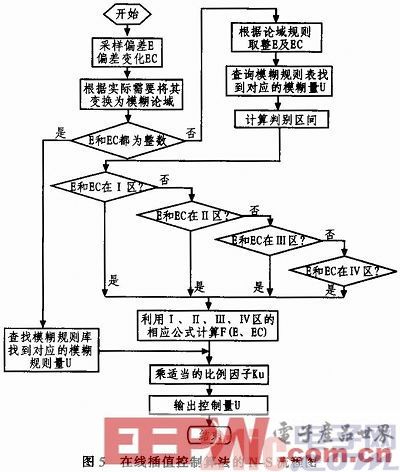
文中利用在线差值控制算法的特点,设计了算法实现的软件流程,如图5所示。
?
?
3.2 操作系统下的功能实现
为满足多任务的调度和系统实时性的要求,软件的整体实现,本设计引入μC/OS-Ⅱ操作系统。
3.2.1 RTL8019AS底层驱动程序
通常情况下,用户根据硬件芯片型号找到RTL8019AS底层驱动程序库的编写所需要的文档资料即可编写相关的底层函数,其主要功能函数如下:
NicInit()一RTL8019AS的初始化;
NicClose()一关闭RTL8019AS芯片数据收发功能;
NicReset()一复位RTL8019AS芯片;
EtherOutput()一数据包输出;
Etherlnput()一数据包接收。
网络通信还需要底层RTL8019AS驱动程序支持,参考R,rL8019AS以及AT91FR40162,即可编写出针对此系统的RTL8019AS底层驱动程序。
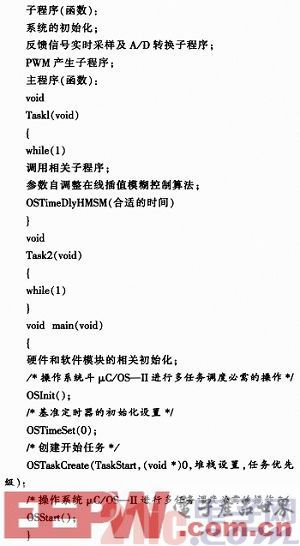
3.2.2 基于μC/OS-Ⅱ实时操作系统主函数及相关任务的编写与嵌入
?
?
4 结束语
对上述的程序进行调试后,并结合硬件调试表明文中所设计的运动控制卡能够实现准确的位置及速度控制,受控电机运行平稳,基本能实现对电机的控制功能,通信稳定。对于长期的稳定性测试,现在浙江绍兴某袜机公司的试着运营阶段,初期表现良好。
- STM32学习笔记:在IAR中建立FWlib 3.0项目(08-13)
- 基于STM32单片机的火控系统信号采集测试(11-14)
- 基于LabVIEW的STM32调试平台设计(11-17)
- 基于STM32的LF RFID识别系统设计(11-25)
- STM32中断与嵌套NVIC快速入门(01-25)
- 基于TLC5947的旋转LED屏显示控制器设计(01-25)