一种基于ATmega16 的电液伺服阀反馈控制器设计方案
时间:04-16
来源:互联网
点击:
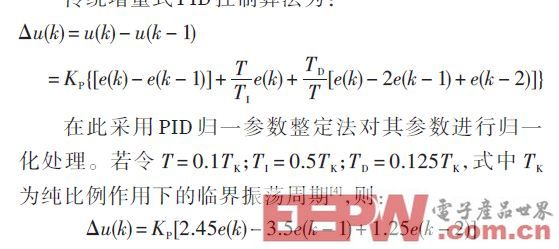
传统增量式PID控制算法为:
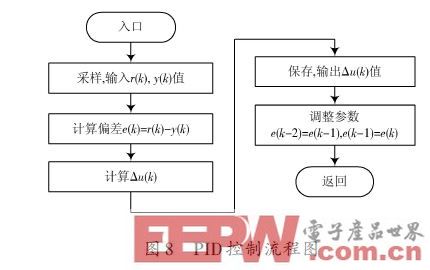
这样,对多个参数的整定调节问题简化成了对一个参数KP 的整定。控制流程如图8所示。
6 系统软件设计
软件结构采用前后台系统设计,主程序是一个死循环结构,通过函数调用和全局变量与子程序进行参数传递[5].软件流程如图9所示。
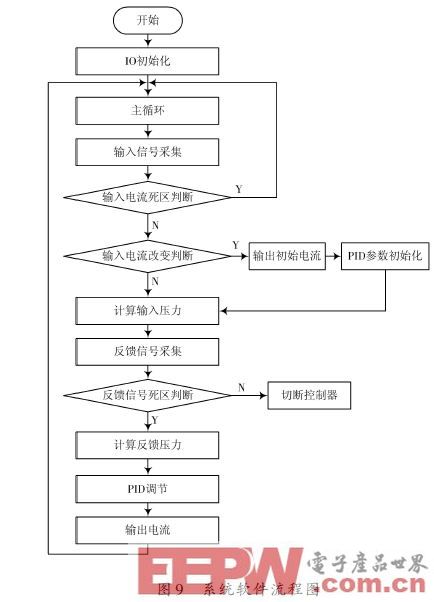
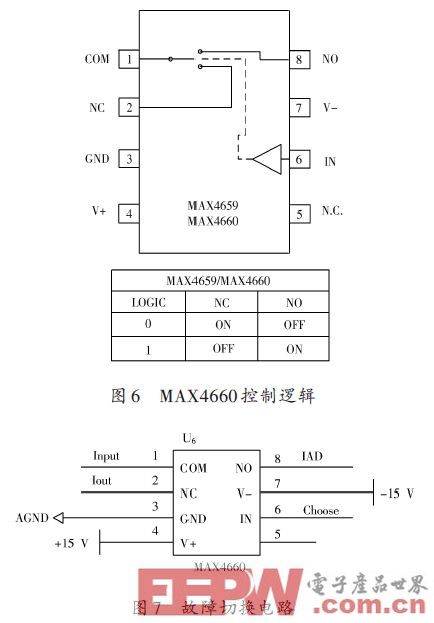
输入信号为4~40 mA 电流信号,反馈信号为4~20 mA电流信号。电流信号若小于4 mA则认为信号处于死区,输入信号处于死区则控制器不予响应,输入信号不在死区而反馈信号处于死区则认为系统故障,切断控制器。
7 结束语
本文针对电液伺服阀在实践应用中的不足,设计了电液伺服阀控制器,显着提高了电液伺服阀在实践应用中的稳定性和精确性。经过现场实际测试,该控制器实现了控制电液伺服阀稳定精确地输出压力,解决了电液伺服阀输出压力摆动、输出压力不足或过大的情况。并且通过故障判断和故障自切除功能使系统工作更为可靠。
- 基于MMS的即时报警系统设计(01-23)
- 基于ATmega162的智能仪器设计(08-18)
- AVR汇编初探之二《AVR的指令与汇编系统》(01-10)
- Atmega16与DS1302数码管显示程序(12-02)
- ATMEGA16与DS18B20数码管显示(12-02)
- ATmega16利用TWI模块读写24C02程序(12-02)