基于Kinetis60的智能循迹小车设计
时间:05-26
来源:互联网
点击:
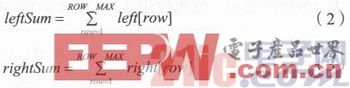
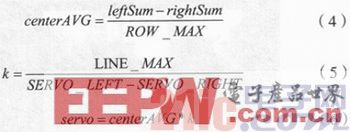
Sum,rightSum做差,然后对差值除以行数,得到赛道偏移量(式4),根据偏移量centerAVG大小,centerAVG的大小基本上可以判断当前赛道情况,根据赛道情况,对centerAVG乘以不同的系数k(式5),得到舵机值(式6),然后进行方向控制。
5 结论
文中提出一种基于摄像头的智能循迹车的设计及实现方法,处理简单,占用MCU资源少,执行效率高。文中提到的算法在具有本文特征的其他赛道上也可以使用。通过多次实践,算法正确识别率达93%以上,在实际的大学智能车竞赛中被多次采用,并取得优异成绩。但摄像头的高度和角度还需要进一步的试验、调整以得到更好的图像采集效果,算法仍需进一步优化,以提高系统的稳定性。