基于LPC2210和uC/OS-Ⅱ的无刷直流电动机控制设计
的电磁兼容使用光耦隔离器TLP521,它是三路位置信号的光耦隔离。
霍尔元件根据转子现在所处的位置发出的位置状态信息,LPC2210接收到位置信息后,发出相应电枢电流换向信号,经过光藕隔离,电枢电流换向信号经过驱动电路再去驱动功率管,而功率管的负载就是无刷直流电动机的电枢了,这样电枢电流换向信号就可以控制加到无刷直流电动机的电枢电压和电流,这时电枢产生的磁势和转子永磁磁场产生的磁势相互作用使转子不停的旋转。
2)保护电路,全桥逆变器中最害怕的是逆变器的上下桥臂同时导通,这时驱动电路就处于短路状态,桥臂上驱动功率管会因为电流过大而瞬间烧毁,所以在设计驱动电路方面,在这个闭环控制系统中加入了一个电流反馈电路,对功率管电流进行监测,若电机在运行过程中出现电流过大,LPC2210处理器通过A/D采集到这个信号后马上禁止PWM输出,使逆变器的上下桥臂就处于关断状态。同时,根据A/D转换,可以实时监测每一相电枢电流,相应调整PWM输出的占空比可以达到调节电机转速的目的。
3)转子位置检测。在一个周期内,无刷直流电动机内的位置传感器输出6种有效的状态,分别对应转子的不同位置。转换成换向逻辑,LP C2210的GPIO口通过读取换向逻辑知道转子的位置。当输入信号跳变时,LPC2210的定时器可选择使捕获事件产生中断,而进行中断处理换向。
3 软件设计
系统使用uC/OS-Ⅱ实时操作系统,本系统代码精简,可移植性好,多任务,抢先式,很适合做电机控制。
中断服务程序是软件设计的重点,主要包括获取转子位置信息(电枢电流换向),对电枢电流的采样,输出PWM信号以及过电流保护程序。
1)通过读取连接电机位置传感器的LPC2210 GPIO口可以获得转子的位置信息,当IO口的当前状态和前一读取的状态一样,说明电枢电流的方向还不需要改变,保持PWM信号输出不变。当IO口的当前状态发生了变化,就需要改变电枢电流的方向了,LPC2210的定时器可以捕获输入霍尔传感器的信号而产生换向处理中断。
2)通过电流传感器获取电枢电流大小,经过A/D转换,控制器通过把转换值与设定值比较,若电流比预定的大就要减小输出PWM信号占空比的值,反之就要增大占空比的值,若电流大小超过的电枢电流的极限值,就产生最高级别的中断申请,禁止PWM输出,起到保护驱动电路的目的。
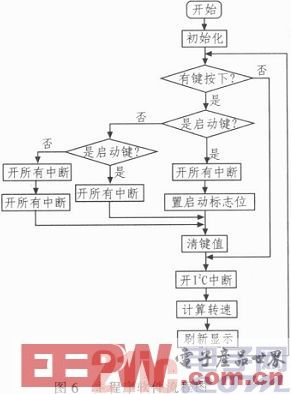
系统软件主程序主要完成系统初始化和双闭环PI参数的设定,电机转速计算和电机启动停止控制等功能。主程序流程图如图6所示。
4 结束语
以LPC2210芯片为核心的无刷直流电动机控制系统,硬件电路简单可靠,采用不同优先级的中断服务,保证了电机工作实时性和可靠性。基于uC/OS-Ⅱ操作系统的支持,本控制系统具有良好的扩展性,可根据需要创建新任务。同时软件设计的通用性良好,只需修改与硬件相关的少许代码,就可以应用到不同的处理器中。
- 在uclinux下实现拨号(04-21)
- 基于uClinux嵌入式系统的汽车黑匣子的设计(07-08)
- uClinux进程调度器的实现分析(04-13)
- 嵌入式操作系统uCLinux详解(03-19)
- 多任务操作系统Nucleus简介(04-21)
- UC/OS与uClinux的比较(04-21)