一种高可靠的红外光循迹小车电路设计
本文针对小车采用传统光循迹电路的两点不足,提出了一种高可靠小车红外光循迹电路的设计。该设计用低占空比强红外光调制发射能克服环境光线的干扰;再对光接收信号进行交流放大后解调能进一步克服环境干扰;采用逐个循环发射、接收能克服光衍射对相邻光敏管的干扰,最后给出设计的电路结构框图及部分电路图。经分析该设计避免了传统设计繁琐的调试工作量,可以满足各种环境光线的应用!
1 传统光循迹小车电路结构
1.1 小车循迹简介
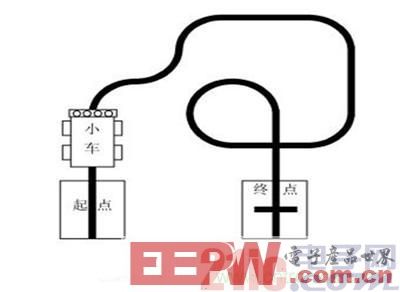
所谓小车循迹,就是在白纸上画出黑色的线条,称为赛道;小车沿着赛道按要求(可以做一些指定的任务)行进时,能自动识别赛道并按赛道线条行走,称为小车循迹。如图1所示,该赛道是2010年全国职业院校大学生职业技能竞赛月球车竞赛项目湖南赛区赛道图。
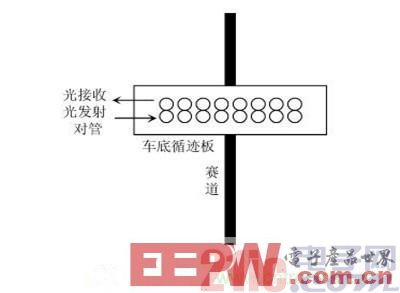
一般的,小车底部安装一排(或几排)红外光发射、接收阵列用于检测赛道,从而控制小车能沿线行走。光发射、接收阵列要与赛道成十字交叉排放,有的也做成弧形或倒“V”字型排放。这一排红外光发射、接收阵列的数量越多越密,控制小车跑起来越稳,但编程时算法越复杂。一般少则四、五个,多则十来个,如图2 所示。也可以采用双排甚至多排设计。
1.2 传统循迹小车红外光发射、接收电路
传统的红外光发射、接收电路的发射部分用直流电流驱动,接收部分采用比较器。比较器的一个比较点用电位器调整直流电位,另一个比较点接光敏管的输出端,这种简易做法往往也能满足简单比赛要求。但抗干扰能力较差。
一种传统简易循迹电路图如图3所示。
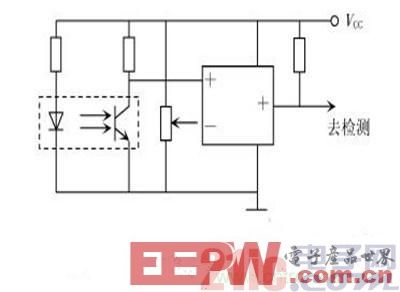
图3 一种传统简易循迹电路图
采用红外光作发射接收的目的是为了减少环境光线的干扰,但若不采取辅助措施,当环境光线较强时,并不能很好的克服环境光线的干扰;另外,还需采取措施克服相邻收发对管的光衍射干扰。
2 红外光循迹设计原则
2.1 选择合适的光发射驱动电流 一般应将发射电流设计在发光二极管的最大正向电流允许值IF 上。发射的红外光线强度提高了以后,环境光的红外成份占总光线的比例就减小了,可以克服一部分环境光干扰。但是,过于提高发射光电流,会产生较大的热量,使发射管光衰现象加剧。
要想既提高发射电流,又使发射管安全工作,则可以采用低占空比脉冲调制发射。
2.2 脉冲调制式红外发射和红外接收效果分析
环境光中的红外成份表现出来的是直流分量,采取调制式[4]红外发射措施后,调制接收电路接收的是调制信号,可以将环境光中的直流分量滤除。
2.3 采取低占空比脉冲调制红外光发射的优势
红外光敏三极管接收灵敏度并不因红外发光二极管发射信号的占空比降低而降低。降低红外发光二极管发射信号占空比后,可以在红外发光二极管上施加较大电流,甚至可以大大超过红外发光二极管的最大允许正向电流IF ,而不会损坏红外发光二极管。增加的那部分电流相当于红外发光二极管的发光强度大大加强了,则抗干扰能力也进一步加强。
2.4 采取稳定的38.5 kHz频率调制发射的红外光
红外调制光信号在调制频率为38.5 kHz时,红外光敏接收灵敏度最高。
为获得较稳定的38.5 kHz的调制频率,应避免用电阻、电容和电感等分立元件配合非线性器件组成振荡电路作调制信号,应采用晶体振荡器或有源晶体振荡器配合非线性元器件作振荡电路。
用晶体振荡器作MCU 的外部晶体,用编程的方法启动38.5 kHz/10%~20%占空比的PWM 信号作调制振荡信号;也可以用晶体振荡器配合非线性器件进行振荡、分频后获得38.5 kHz/10%~20%频率和占空比。
2.5 采用交流放大电路作红外接收放大器
即使调制光受到环境光的淹没,但是调制光并没有因此而消失。接收信号后送交流放大器放大,被淹没的调制光信号仍可得到复原,而直流成份的环境光被交流放大器阻挡,这就有效还原出了被淹没的有效红外光,克服了强环境光的干扰。
2.6 采用巡回开通某一路发射接收克服光衍射
压线的那一路原本不应该接收到信号,而相邻没压线的那一路还在继续发光。由于光衍射,相邻没压线那一路发出的红外光很容易衍射到压线的那一路红外接收管,导致判断失误,从而引起干扰。
当巡回开通某一路时,任何时候只一路发光,检测电路也仅接收这一路的信号,即使这时候发光的那一路衍射到压线的接收电路,但MCU 并不去读取被衍射的那一路。这就克服了相邻通道的衍射干扰。这时要注意软件设计时采集一个巡回的周期时间要恰当。
3 高可靠红外光循迹电路设计
3.1 低占空比脉冲波38.5 kHz/10%~20%脉冲波形成
遵循2.4节设计原则,第一种方法采用具有PWM外设的单片机启动PWM 模块产生脉冲波,不建议用
- 基于TMS320F240的红外线设备远程报警系统设计与实现(04-17)
- 基于DSP的高速便携红外气体分析仪(05-18)
- 基于MSP430的颅内出血检测设备设计方案(07-20)
- 基于FPGA的多DSP红外实时图像处理系统(01-21)
- 一种新型的多DSP红外实时图像处理系统设计(02-03)
- 基于DSP+FPGA的红外图像小目标检测系统设计(02-15)