基于PLC和M2M的智能控制器设计
似功能的主板。外围集成硬盘、显示器、数/模,模/数转换模块、数字信号采集板、自适应PLC通讯模块和网络通讯模组,采用Windows操作系统,通过数模/模数转换模块与被控装备上的传感器、仪表、阀门等设备进行数据交换,对被控装备进行控制和调节;智能控制器可通过自适应PLC通讯模块与多种PLC设备如上位机、总控机进行数据交换,可通过网络通讯模组接入互联网、局域网等网络,进入产品运维平台,实现远程在线服务。
2.2各模块具体设计实现
2.2.1智能控制器主板设计
(1)嵌入式并行处理技术的应用。传统PLC控制系统中,CPU“顺序扫描,不断循环”的工作方式决定了PLC在执行时,指令必须短小精悍,且只能串行,无法并行处理指令,限制了PLC的控制实现,使其无法实现复杂的控制算法和控制功能。
本文设计的智能控制器通过对嵌入式并行处理系统架构和任务并行协同处理技术的研究,采用嵌入式并行处理架构CPU,取代传统的单片机、PLC等串行处理架构CPU,作为控制系统的控制芯片,结合增强型的DSP指令集,增加了对并行任务处理的支持、快速的中断处理和硬件I/O支持、低开销或无开销循环及跳转的硬件支持、单周期内操作的多个硬件地址产生器的支持,比16位单片机单指令执行时间快8~10倍,完成一次乘加运算快16~30倍,即具备了传统单片机、PLC的高稳定性、高精度的特点,同时又提高了整个系统的运行效率,使系统的控制功能更加丰富、高效。
(2)高级PID控制器算法的实现。PID控制器是一个在工业控制应用中常见的反馈回路部件,其核心算法由比例单元P、积分单元I和微分单元D组成[11],通过对,和进行参数设定,来适用于基本线性和动态特性不随时间变化的系统,通过配置可用于温度、压力、流量等参数的单回路控制方案[12]。PID控制器算法有三种,分别为增量式算法、位置式算法和微分先行[13]。
传统的控制系统如PLC中,通常会集成PID控制算法函数,供控制功能开发人员调用,对温度、压力、功率等模拟量参数进行调整,但不同品牌的PLC集成的PID控制算法各不相同,且作为核心算法固化在PLC控制器内部,设计人员无法选择或更改,这就要求在控制系统的设计过程中针对不同类型的控制需求来选择使用不同品牌的PLC控制器,且一旦选定后将无法更改,这给系统的设计、开发,后期的维护带来很多的麻烦。
本智能控制器根据三种PID算法的不同特点,通过设定参数的方式让系统设计人员在系统设计及后期维护过程中灵活选择,而不影响系统已有的控制功能。
2.2.2嵌入式A/D、D/A转换器应用
A/D、D/A转换器是控制器与被控设备之间数据传输的纽带,其性能指标主要通过取样与保持、量化与编码、分辨率、转换误差、转换时间、绝对精准度、相对精准度等几个指标来衡量,传统的PLC控制系统中的A/D、D/A转换器受其自身和外部条件限制,在抗干扰能力上比较差,在强电压、高电磁干扰的信号源的采样上容易出现“毛刺”或电源纹波,降低了信号的分辨率和精准度,使得在一些对信号精度要求高的自控设备上无法达到控制要求。
本文设计的智能控制器通过对嵌入式A/D、D/A转换设计技术、多值A/D转换器及数字滤波器技术的研究,在降低A/D、D/A转换器体积和功耗的情况下,采用数字滤波算法增强A/D、D/A转换器的抗干扰能力,提高信号转换的分辨率和精准度。
2.2.3自适应PLC网络通讯模块的设计
本控制器集成的自适应PLC通讯模块,包括与嵌入式主板匹配的标准通讯口、与各种PLC设备匹配的多种通讯口,如PCI,RJ45,RS 232,RS 485等通讯接口及各种PLC通讯协议。嵌入式主板通过标准通讯口与自适应PLC通讯模块上的标准通讯口进行通讯,自适应PLC通讯模块可选用各种通讯口与不同的PLC设备进行通讯。当自适应PLC通讯模块与PLC设备进行通讯时,如果PLC设备支持RJ45,RS 232,RS 485通讯接口则优先选用,否则,则选用PCI通讯口,通过扩展PLC通讯卡与这些PLC设备进行通讯。其中PLC通讯卡可根据与之进行通讯的PLC设备进行选择,如与西门子系列PLC设备进行通讯时,可选用西门子品牌的通讯卡。
该自适应PLC通讯模块具有协议自动匹配功能,可根据与之通讯的PLC设备的通讯协议,自动进行协议匹配,建立通讯连接。模块结构图如3所示。
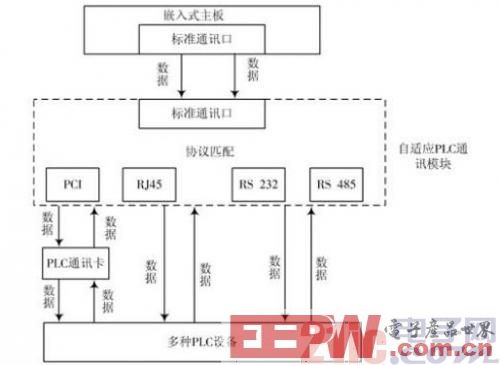
图3 PID控制器原理图
(1)多工业现场总线自适应技术实现。目前世界上存在着大约40余种现场总线,虽然早在1984年国际电工技术委员会/国际标准协会(IEC /ISA)就开始着手制定现场总线的标准,但由于各个国家各个公司的利益之争,所以至今统一的标准仍未完成。很多公司也推出其各自的现场
- 嵌入式系统硬件平台的软件PLC实现方法(04-12)
- 利用数字信号控制器实现稳健的PLC通信(05-02)
- 基于Linux系统的软PLC设计(07-19)
- 基于VxWorks的嵌入式实时PLC设计(01-08)
- 基于AT89C51单片机的微型可编程控制器(04-23)
- 基于DSP的光纤监控网络系统方案(08-03)