����Ƕ��ʽ����ϵͳUC/OSII���ں�ʵ��
��ǰ������һ����ʹ�õ�ϵͳ�У�����û�����ȼ�֮�֡�Ӧ�ó�����һ������ѭ�������������ڴ����е�˳�����У�������Ӧ������ʱ�������ǿ��������ʹ���жϻ��ƣ����ǵ�ϵͳ�Ƚϸ��ӡ��ж���Դ����ʱ���жϳ���ֻ�ܽ��������������Ϣ�������úء�������˳��û��ִ�е�������ʱ���������ִ�б���ȴ������Խ����������ÿ�ε�ִ��ʱ�������������ܼ�ʱ������������Ӱ��ϵͳ�����С����������Ҫ����ʱ���������Դ��������ϵͳ���Dz����������ģ�����ֻ��Ӧ���߱�д�ĸ��ӳ���ܿ��ܻ����Bug��
Ƕ��ʽ����ϵͳ��ʵʱ����ϵͳ���������ض���Ӳ��ƽ̨�ϣ�һ��������������洢��������������I/O�˿ڣ���������ϵͳ������Ҫ��ʵʱ�Ͷ�����������û������������������Ӧ�ó���ʹ��Ƕ��ʽ����ϵͳ���û�ֻ�����������������ϵͳ�м��ɣ��Ƚ�ʡ����ʱ�䣬����߳���Ŀɿ��ԡ�
2UC/OSII�����������
UC/OSII(Micro Control Operation System Two)��һ��Դ���빫����Ƕ��ʽ����ϵͳ�������������C����д�ģ����������Ļ�����������ϸ��˵����ʾ��������ֲ�Ժá����ԣ��ȶ�����ɿ��Ըߣ�����Ҳ�Ƚ����ơ�UC/OSII�������ֵ�Ƕ��ʽ����ϵͳ���ں˶���ռ��ʽ�ںˣ�����Ϊ������ȼ�������һ�������������̾��ܵõ�CPU�Ŀ���Ȩ������������ȼ������CPUʹ��Ȩ������ϵͳ�����������
UC/OSII������ʵ����һ�γ���ִ���ض��Ĺ��ܣ�ӵ���Լ��Ĵ���Ͷ�ջ�ռ�(���������ļĴ��������ص�ַ����ʱ����)��һ�㶼�ǿպ��������᷵���κ�ֵ������ִ��һ�κ�������ʱ����OSTCBDly,�����ھ���OSTCBDly��ʱ�����ں��ٴ����У�Ȼ����������л���ʹ�����������С�
���磺
void Task(void)
{ ��������
for(;;) {
����ִ�д���
OSTimeDly( ) ��ʱ���� ;������������־��������ʱ��ʱ�����ڲ���������OSSched( )�����������
} }
3UC/OSII���ں����ݽṹ
(1) ������ƿ�OS��_TCB

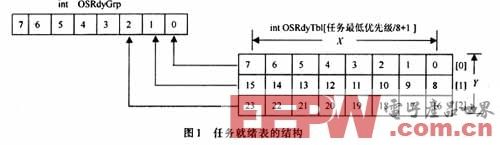
(2) ���������OSRdyTbl[]��OSRdyGrp
ÿ������ľ���״̬��־�������������(��ͼ1��ʾ)��OSRdyTbl[ ]�е�ÿһλΪ1��ʾ��Ӧ���ȼ��������ھ���״̬��OSRdyGrp�е�ÿһλΪ1����ʾÿ8��Ϊһ���������������1���Ѿ�������ֵԽС���ȼ�Խ�ߡ�
4UC/OSII�ں˵����л���
�κμ����ϵͳ����ʱ�ӣ����Ǽ���������ʱ�䣬ͨ����ʱ���Ķ�ʱ�жϣ�����ʱ������ÿ�����������ִ�е�ʱ�����ڣ���һ�����������Ӧ��ִ�е�����Ӧִ��һ�Σ�������Ϊʱ����̫С���е�����û��ʱ��ִ�С���ˣ�����Ķ��١�ʱ�����ڵ�ȷ����CPU��ѡ������ϸ���ǣ�ȷ����һ��������CPU���������ʱ����ռ���ز�Ҫ̫��
���������ȶ�ϵͳ���г�ʼ����������������ֵ����������Ķ���������������ƿ��������������Ƚ���һ��������ȼ��Ŀ�������û������������Ҫ����ʱ����һ�����������ۼӼ������������ʱ�䡣�������������һ���ڴ棬����Ĵ�����ֵ������Ĵ����ַ���ٰѶ�ջ�ĵ�ַ����������ƿ飬�Ӷ������������롢�����ջ��������ƿ���ϵ��һ�𡣲���ϵͳ�ں˿���ͨ��������ƿ��ҵ������ջ���Ӷ�ջ��ȡ����������ַ�������ṹ��ͼ2��ʾ����

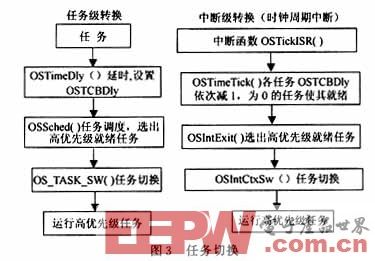
������л�������2��ʱ��1���ǵ�ijһ�����������ʱ�͵�����ʱ������ʹ������ʱһ����ʱ�����ڣ����������л������о�����������ȼ��������;��2����ÿһ��ʱ�������жϺ��жϳ���������ʱ������ʹһЩ����������������Ȼ������������������������������������л�(��ͼ3��ʾ)��ѡ�����еĸ����ȼ��������С���
Ƕ��ʽ����ϵͳ�Ƕ�����ģ������л�������ļ������ɻ�����Ա�д�������л�����OS_TASK_SW( )�����ó��жϺ���������ʱʹ�õ��������ж�ָ������ڽ����жϳ���֮ǰ����ǰ����Ĵ����ַ��״̬�־��Զ������ڵ�ǰ����Ķ�ջ������������8086�ij�������л�������
(1) _OS_TASK_SW(��_OSIntCtxSw)PROC FAR�жϳ���
(2) PUSHָ���ָ�����_OS_TASK_SW�����浱ǰ����Ĵ�����������Ķ�ջ�������ַ�Ѿ����档
(3) ADD SP��n��ָ����Ԫ�_OSIntCtxSw����Ϊ�ú������жϳ�����ã�������֮ǰ������һЩ��������ջ�����仯��������Ҫ������ȥ��ǰ���������ı����ַ�Ͳ������������ַ�ڷ����ж�ʱ���Ѿ����档
(4) ���������ĵ�ǰ��ջ��ַ����������ƿ�OS_TCB��������SS��SP��
(5) �����Ѿ���������ȼ�������ƿ飬ȡ����ԭ������������ջ��ַ��
- LinuxǶ��ʽϵͳ����ƽ̨ѡ��̽��(11-09)
- ����Winodws CE��Ƕ��ʽ������ϵͳ�������ʵ��(03-05)
- Ƕ��ʽϵͳʵʱ�Ե�����(06-21)
- Ƕ��ʽʵʱϵͳ�е����ȼ���ת����(06-10)
- Ƕ��ʽLinuxϵͳ��MMC���������������о�(06-10)
- FPGA��DSP���ܽ���(06-16)