基于LabVIEW的数控机床网络测控系统--数控机床下位机测控系统硬件设计(一)
考光束,传感器与参考光束之间的相对位移由装在传感器内的横向光电二级管测得。第三束光用作装在6D传感器内的小型光电测角仪的参考光源,用来测量角度误差(俯仰角和偏摆角)。为了保证激光光束的稳定性,测量仪在结构的设计以及激光器的选择方面都做了仔细设计,以使测量仪的横向和角度漂移量都降低到最小,从而保证测量仪的长期稳定性。测量仪配有自动气压、环境温度补偿器,自动校正环境变化对激光波长及长度测量的影响,其中多重数字滤波器使由空气波动及温度梯度引起的测量误差降到最校
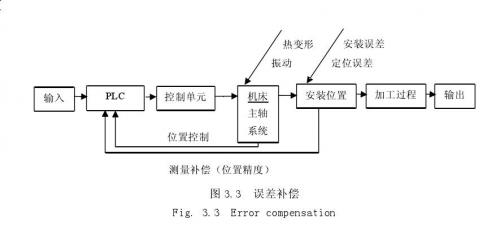
其中误差补偿重点是研究加工中心误差的影响因素和计算机辅助软件补偿技术,其特点是在对机床本身不作任何改动的情况下,综合运用当代各学科的先进技术和计算机控制技术来提高机床加工精度。误差补偿的结构框图如下图3.3所示。
测得的补偿前后机床的三次运动的正向和负向位置精度误差如表3.1和表3.2所示。
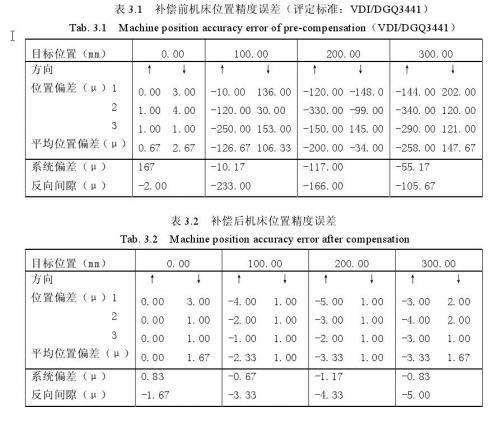
如上表所示,下位测控机采集平台,通过激光干涉实时记录机床的动态位移及定位位移,软件通过对数据实时的采集分析,存储,将整个数控机床运动过程的定位位移实时记录。在分析软件下可以清楚看出机床3次运动过程中正向和负向位移误差的对比。
进行补偿前的位移精度曲线如图3.4所示,进行补偿后的位移精度曲线如图3.5所示。
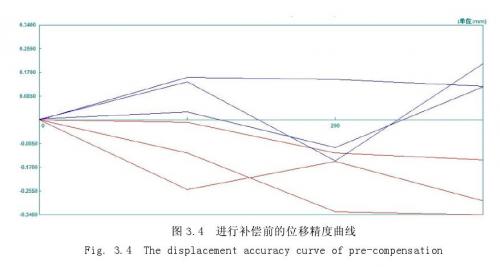
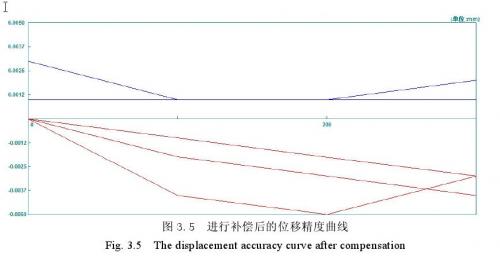
通过以上图表,可以明显的看出补偿后的位移定位精度有了明显的提高。由于实验测试值仅是测的一台刚刚改造后的数控机床数据,数据只是特例数据,以后要进行多台数控机床的数据测试分析,这样的分析后的结果就有了普遍性和统计性。
3.2.2温度补偿技术研究
温度传感器选用PT100铂电阻温度传感器。它适用于测量(-60 ~+400℃)之间的温度,完全适用于机床的使用环境温度(5 ~ 45℃)。PT100在0℃时电阻为100欧随着温度的变化电阻成线性变化,大约是每摄氏度0.4欧。为了把PT100随温度变化的电阻转换成电压,AD转换器模拟量接口提供恒流源输出,即输出12.5mA恒电流源供给PT100传感器,在传感器回路中产生5Mv/℃线性输入电压。AD传感器把这个电压转换成数字量,程序周期地读这些数字量,并将所读的这些数,利用下面公式计算出温度值。
温度T [℃] =(温度数字量- 0℃偏置量)/ 1℃数字量(3.1)
其中:温度数字量=存储在NC-PLC接口IW xxx中的测量值;
0℃偏置量=在0℃测量出的数字量,该值为4000;
1℃数字量=温度每升高1℃的数字量,该值为16.
PLC定时采样温度值,利用上式计算出温度数字量并转换为带一位小数点的十进制温度值,然后计算出温度补偿参数K 0(T)、tanβ(T)周期性送至NCK刷新温度补偿参数。
(1)温度补偿的理由
金属材料具有“热胀冷缩”的性质,该特性在物理学上通常用热膨胀系数(Thermal expansion confficient,αtherm)描述。数控机床的床身、立柱、拖板等导轨基础件和滚珠丝杠等传动部件一般由金属材料制成,由于机床驱动电机的发热、运动部件摩擦发热以及环境温度等的变化,均会对机床运动轴位置产生附加误差,这将直接影响机床的定位精度,从而影响工件的加工精度。对于在普通车间环境条件下使用的数控机床尤其是行程较长的落地式铣镗床,热膨胀系数的影响更不容忽视。以行程为5m的X轴来说,金属材料的热膨胀系数为10ppm(10um/每1m每1℃),理论上温度每升高1℃,5m行程的X轴就“胀长”50um.日夜温差和冬夏季节温差的影响便可想而知。因此高精度机床要求在规定的恒温条件下制造或使用,普通环境下使用的数控机床为保证较高定位精度和加工精度,须使用“温度补偿”等选件功能消除附加误差。
(2)系统中温度补偿原理
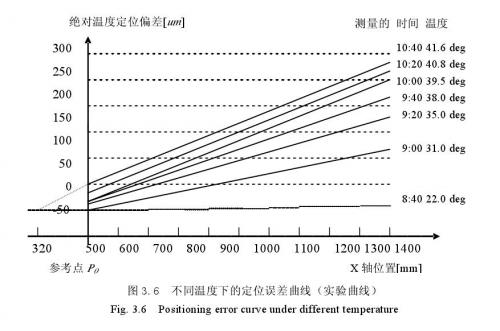
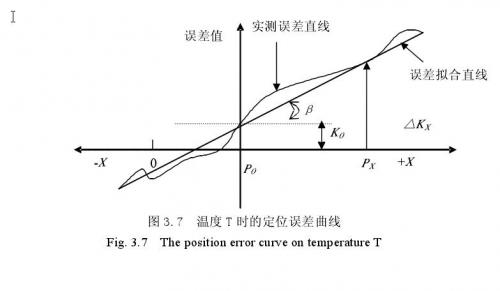
机床坐标轴的定位误差随温度变化会附加一定偏差,对每一给定温度可测出相应的定位误差曲线,为了完成温度补偿需要测出不同温度下的定位误差曲线。如图3.6所示为一组实验曲线,测量条件是:以22度误差曲线为基准,在行程500~1500mm范围内不停的运动加热机床,每隔20分钟做一次定位误差测量采样,采样间隔100mm,并用点温计记录滚珠丝杆的温度。因此一定温度T的定位误差曲线可以表示为如图3.7所示的直线,其数学表达式为:

式3.2中,梯度tanβ(T)和轴位置不相关温度补偿值K 0(T)均是随温度变化的函数。
不同温度下的定位误差曲线如图3.6,以及温度为T时的定位误差曲线如图3.7所示。
系统中温度补偿功能的工作过程:将测量得到的温度偏差(补偿)值送至NC插补单元参与插补运算修正轴的运动。若温度补偿值ΔKx(T)为正值就控制轴负向移动,否则正向移动。由于温度影响的滞
- 基于虚拟仪器的特性测试参数数据库的设计(06-24)
- 基于LabVIEW的USB实时数据采集处理系统的实现(03-26)
- 基于LabVIEW的DSP设计(04-10)
- 图形化系统设计:缩短开发时间的嵌入式设计(11-22)
- 基于DSP+LabVIEW的特高压验电器设计方案(02-18)
- 基于LabVIEW的32位处理器嵌入式系统的开发(05-13)