基于CAN总线的电动汽车能量回收系统研究
超级电容的电压、电流等信号进行测量及故障监测。
(2) 存储信息模块
扩展eprom32k×8位的紫外线擦除电可编程的只读存储器27256。
(3) 信号输出模块
本系统要求输出四路pwm波形,控制主回路双向升、降压变换的六种控制模式。采用可编程逻辑器件gal16v8与80c196kc的pwm口直接连接,实现四路pwm输出,分时控制主回路的四个igbt管的开关占空比,进行电压调节。
(4) 通信接口模块
控制器扩展的通信接口是can总线接口,can总线接口扩展采用can通信控制器sja1000+高速光耦6n137+can总线收发器 82c250电路,并可通过max232芯片与主计算机的rs232c串行口连接,实现主计算机与控制器的双向通信,其电路原理图如图3所示。
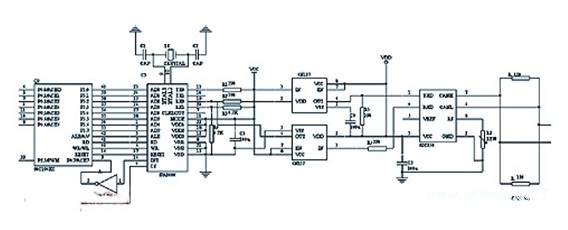
图3 can总线接口电路原理图
4.3 dc-dc控制器软件系统设计
系统软件的功能是对电动汽车的运行状态进行判断。若汽车加速踏板踩下,则超级电容工作在放电方式,调电动升、降压子程序;若汽车刹车踏板踩下,则超级电容工作在充电方式,调制动升、降压子程序。
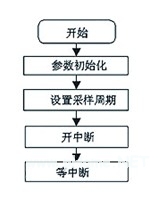
图4 主程序框图
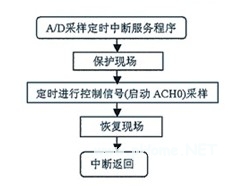
图5 中断服务程序框图1
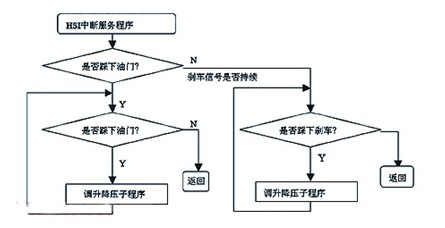
图6 中断服务程序框图2
为了便于软件的编写和调试、控制算法的改变和分析使用,软件采用了模块化结构。系统软件由主程序、子程序、中断服务程序组成,图4、5、6分别给出了主程序及2个中断服务程序软件框图。
初始化中应设初始值及设定全局变量,初始化各中断服务程序用到的中断向量,并设置软件结构,重置优先级顺序。
a/d采样中断服务程序利用80c196kc的高速输出器hso的cam锁定位,定时启动ach0通道。加减速中断服务程序中使用了80c196kc的高速输入器his记录某一外部事件发生的时间,用于判断加速、减速信号,这使得程序的编写非常简明。
5 结束语
本系统的软硬件均采用了模块化设计,通用性好、灵活性强,可作为开发平台,便于扩展,是一个开放式的分布式控制系统,易于实现人机对话和远程通信。
参考文献
[1] 阳宪惠. 现场总线技术及其应用[m]. 北京:清华大学出版社,1999.
[2] 孙逢春. 电动汽车[m]. 北京:北京理工大学出版社,1997.
[3] 葛林等. can通信网络在汽车中的应用研究[j].汽车技术,2000,(11).
[4] 王兆安. 电力电子技术[m]. 北京:机械工业出版社,2001.
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)