基于嵌入式的无人机勘察系统设计
时间:09-12
来源:互联网
点击:
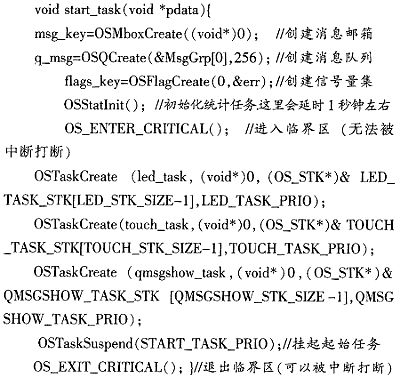
简单易操作,因此,本系统的软件设计采用可管理64个实时多任务内核的UCOSII。要实现对无人机的飞行控制,软件编程的重点在于对UC/OS操作系统的体系结构拓展,建立起RTOS实时操作系统。以下是操作系统的部分示意代码。
4 系统测试
地面监控平台是这个系统设计的重要部分,监控中心上位机采用Qt开发,通过Socket编程,实现上位机和无人机控制程序之间能够双向通信,实时接收无人机采集到的信息和发送控制指令,完成所需的飞行任务。地面监控平台能过得到无人机采集到各类传感器单元的数据,并实时在窗口显示出来。本次实验让无人机进行简单的飞行测试,系统能够及时响应。图3是监控系统接收到的部分信息。

5 结束语
文中设计了基于嵌入式的无人机勘察系统,通过引入UC/OS实时内核,能够完成数据的采集、传输和处理,运用DM368视频协处理对高压缩率的H.264标准的图像进行压缩编码,可采集并传输稳定、高速实时勘察到的图像和音频。整体绕着ARM构成的微控制器运转、具有低功耗、数据处理速度高效等特点,随着嵌入式和传感器的不断发展,无人机勘察将在军事、高空拍摄、农业等领域得到更好的发展与应用。
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)