基于K线/CAN总线的KWP2000协议分析及其协议栈的开
是基于K线还是CAN总线的KWP2000协议,都是逻辑非常复杂的系统,并且具有严格的定时和错误处理规范。如果采用纯手工的方式来进行KWP2000协议栈的开发,不仅要耗费大量的时间和人力,其通用性、完备性、可靠性和可维护性都很难保证。而 MATLAB/Simulink/StateFlow不仅具备方便快捷的上层实时仿真环境,还集成了高效的嵌入式代码自动生成工具,为协议栈的开发和维护提供了强大的支持平台。此外,由德国Vector公司的CANoe软件和相关硬件板卡组成的应用开发平台,可用于汽车网络(CAN,Lin等)的上层协议开发和系统测试,该平台同时支持基于K线和CAN总线的KWP2000诊断协议,可作为ECU和诊断设备的测试标准。
图6是协议源码开发过程示意图。首先在MATLAB/Simulink/StateFlow中遵照协议标准进行KWP2000协议栈开发,在仿真调试环境下实现通讯逻辑、定时控制和错误处理,待系统完善后利用StateFlow嵌入式代码生成工具自动生成协议栈C代码,并与目标系统的底层驱动进行集成,然后植入目标系统形成应用程序,最后再利用CANoe作为标准进行系统集成测试。
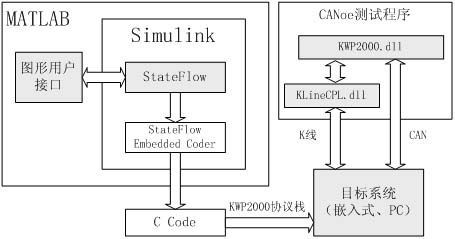
图6 KWP2000协议栈开发及测试流程
在MATLAB/Simulink/StateFlow中进行协议栈仿真开发是协议栈开发过程中的关键环节,在这一过程中必须严格遵照协议标准来实现通讯逻辑,往往需要经过多次“设计-仿真-修改”循环才能使系统最终趋于完善。MATLAB的图形界面提供了方便快捷的仿真输入/输出接口,可大幅度加快开发进度。
协议栈开发完成后可利用CANoe作为标准进行系统集成测试,CANoe的KWP2000协议测试环境如图7所示。
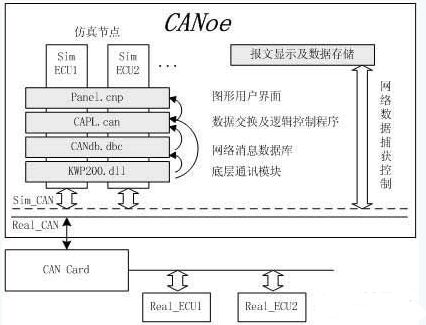
图7 CANoe的KWP2000测试环境示意图
CANoe中的KWP2000实际指的是基于CAN总线的KWP2000,即15765协议。由于CANoe默认的硬件板卡是CAN卡,因此在建立仿真程序时,只需将ECU的网络模块设置为kwp2000.dll即可进行CAN总线的KWP2000服务测试。kwp2000.dll中包含15765应用层协议中规定的服务请求、服务指示、服务响应和服务确认接口函数,用户调用这些函数即可完成Tester端和ECU端的KWP2000诊断服务。此外,该模块中的功能函数还可对ECU的源地址、目标地址、寻址模式等参数进行动态设置。需要注意的是,kwp2000.dll目前只提供了部分KWP2000服务的接口函数,如果用户需要进行其它的KWP2000服务测试,必须根据KWP2000应用层协议构造服务报文数据,然后调用该模块中的 KWP_DataReq()和KWP_GetRxData()函数进行报文的发送和接收。
进行基于K线的KWP2000服务测试时,需要将KLineCPL.dll模块加入CANoe仿真环境,并使用一个代理节点来实现CAN网络和K线之间的报文转发。此时CANoe使用计算机的串口,并通过一个串口/K线转换器与实际的ECU相连,如图8所示。
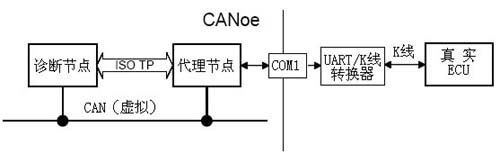
图8 CANoe中基于K线的KWP2000测试连接示意图
6 结束语
KWP2000是一套非常完善的车载故障诊断协议标准,协议的分层结构使得KWP2000诊断服务并不依赖于某种特定的网络介质,其应用层可以移植到任何一种物理层和数据链路层协议之上。基于CAN总线的KWP2000顺应了目前车载网络发展的大趋势,将逐步取代K线诊断协议,成为下一代车载诊断协议的主流之一。
MATLAB/Simulink/Stateflow为协议栈开发提供了方便直观的图形用户接口和功能强大的仿真调试环境及代码生成工具,为嵌入式开发开辟了一条高效快捷之路。Vector公司的CANoe和相关硬件板卡是一个功能强大的应用开发平台,可针对基于K线和CAN总线的KWP2000进行 ECU和诊断设备的上层协议开发、测试及仿真。
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)