高速摄像机远程同步触发系统
高速摄像机是一种可以很高帧频对物体的运动影响进行拍摄的摄像机,高速摄像机一般可以每秒1 000~10 000帧的帧频甚至更高。因此在研究高速运动物体的运动方面有着广泛的应用,例如在汽车碰撞测试过程中、高速摄像可以验证气囊的膨胀方式是否对人体产生不良影响;在开发低噪音的机电设备过程中,可以通过慢动作图像分析防噪音零件震动的情况,以制造更加安静的产品,高速摄像还可以应用于
对子弹发射出膛速度进行拍摄测量。
由于高速摄像机拍摄图像数据量非常大,导致高速摄像机不能像普通摄像机那样长时间记录工作,一般只能连续拍摄几秒钟至几分钟,所以高速摄像机的通常的工作模式采用外部触发模式,高速摄像机开机后不立即进行拍摄,只有当有外部触发信号到来时才进行短时间的拍摄记录,这样就能保证可以拍摄到需要关注的高速影像,在某些特殊应用环境中采用单台高速摄像机不能满足要求,需要使用多台高速摄像机同时工作,这就要求在需要拍摄时实现对多台高速摄像机进行同步触发拍摄影像。这种环境下通常多台高速摄像机架设距离比较远,无法实现手动对多台高速摄像机进行同步触发,这时就需要实现远程高速摄像机的同步触发。
1 系统总体设计
多台高速摄像机同步触发系统是将多台高速摄像机通过以太网连接至监控室,监控室内通过监控计算机或高速摄像机触发信号发送器发送UDP数据包至触发信号接收器,触发信号接收器接收到UDP数据包后,完成对高速摄像机的外部同步触发工作。
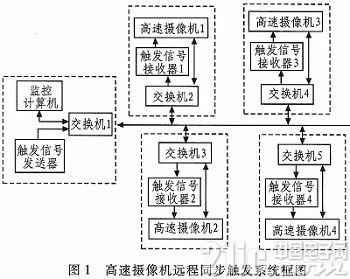
如图1所示,高速摄像机远程同步触发系统,由触发信号发送系统和触发信号接收系统两部分组成,远程同步触发有两种工作模式,第一种使用监控计算机使用VC++编写触发软件,在需要触发时使用软件通过网络发送触发数据,触发信号接收器在接收到触发数据包后,完成对其所控制高速摄像机的触发工作。第二种工作模式为使用触发信号发送器完成触发数据包的发送,当需要触发高速摄像机时,按下触发按钮,当触发信号发送器检测到触发按钮按下时,发送数据给触发信号接收器,接收器在接收到触发数据包后,完成对高速摄像机的同步触发。
2 高速摄像机同步触发器设计
同步触发器主要由触发信号发送器和触发信号接收器两部分组成,触发信号发送器主要完成触发按钮信号的检测和触发信号的网络数据编码工作,主要由STM32F107VCT6和DP83848以及按钮检测部分构成,STM32微控制器集成了包含以太网MAC的网络模块,通过RMII接口与外围PHY芯片DP83848相连,将网络数据通过网络变压器后输出。
触发信号接收器主要由STM32F107VCT6、DP83848、高速摄像机触发部分组成,当接收到网络上的触发高速摄像机数据时,STM32驱动继电器完成对高速摄像机的触发功能。
2.1 STM32F107VCT6系列ARM微控制器
STM32F107VCT6使用高性能的ARM Cortex—M3 32位的RISC内核,工作频率为72 MHz,内置高速存储器(高达256K字节的闪存和64K字节的SRAM),丰富的增强I/O端口和联接到两条APB总线的外设。所有型号的器件都包含2个12位的ADC、3个通用16位定时器和一个PWM定时器,还包含标准和先进的通信接口:多达2个I2C和SPI、3个USART、一个USB、一个以太网MAC和一个CAN。供电电压2.0~3.6 V,一系列的省电模式保证低功耗应用的要求。
本设计主要使用STM32的以太网MAC控制器完成网络数据的发送,STM32F107VCT6的以太网控制器主要有以下功能:
1)通过外接的PHY接口,支持10/100M位/秒的数据传输速率;
2)通过兼容IEEE 802.3标准的MII接口,外接高速以太网PHY;
3)支持全双工和半双工操作;
4)在发送时插入前导符和帧开始数据(SFD),在接收时去掉这些域;
5)以帧为单位,自动计算CRC和产生可控制的填充位;
6)在接收帧时,自动去除填充位/CRC为可选项;
7)可对帧长度进行编程,支持最长为16K字节的标准帧;
8)可对帧间隙进行编程(40~96位,以8位为单位改变);
2.2 DP83848以太网PHY芯片
DP83848是美国国家半导体公司退出的10/100位/秒的单路以太网物理层器件,它具有低功耗性能,内部包含一个智能电源,具有关闭状态能量检测模式。能量检测模式提供了当器件未连接到激活的链接对象时节能的机制。当没有电缆存在或者电缆连接到电源处于关闭状态的对象的时候,能够设置DP83848自动进入低功耗状态。一旦插上电缆器件便可继续工作,当尝试与远端对象建立活动链接的时候,DP83848能够自动上电进入全功能工作状态。
当进入到低功耗能量检测状态时,DP83848通过禁止除能量检测电路以外的所有接收电路来减少其功率消耗。
3 硬件电路设计
3.1 电源部分硬件设计
电源使用金升阳LH05-
- 基于ARM微控制器AT91M40800和CAN总线的煤矸石分选系统设计(11-20)
- 利用stm32的lwip TCP/IP协议栈的通信的思路(12-03)
- LWIP程序OPT.h头文件的各种定义(11-30)
- 9G-STM32 LwIP测试过程简介(11-29)
- 嵌入式LonWorks网络智能网关设计(09-12)
- 基于Altera FPGA无操作系统的LWIP移植(09-12)