基于单片机旋转时钟的设计
摘要:目前,社会、家庭普遍使用的是机械表盘时钟,而一款打破传统的电子旋转时钟如果推出就能够以其新颖的创意来吸引人们,于是文章就研究并设计了一个基于单片机的电子旋转时钟。该设计主要依据人眼视觉暂留(Persistence of Vision)原理,使用电机带动一定数量的发光二极管旋转,让单片机控制发光二极管在相应的位置点亮,只要点亮时间间隔小于人眼视觉暂留时间,就算不是同时点亮的,也能完整的呈现出一个模拟时钟。
关键词:旋转时钟;STC12C5A60S2芯片;无线供电;DS1302芯片;红外遥控
1 前言
目前,时钟的种类是越来越多样,功能是越来越丰富了,但大多时钟还是传统上的时钟,即固定的表盘与指针,其形式与功能都比较单一,故难以吸引人。而一款旋转时钟不仅在创意上摆脱了传统时钟的设计而且也能迎合人们猎奇的心理,并且功能也可以多样化,不仅可以显示时间、日期,甚至连文字都能够显示。文章基于单片机设计了一款跟传统机械时钟一样具有秒针、分针、时针和表盘刻度的旋转时钟,并且具有准确显示即时时间和校准时间功能,且均可由红外遥控器方便完成。
2 总体设计思想及方案
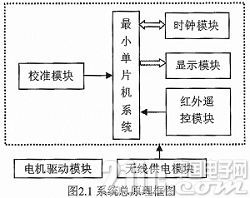
文章拟采用16个发光二极管的亮灭来模拟时钟表盘,其旋转用一个直流电机转动来实现;时钟的1s源信号用DS1302时钟芯片产生;为了保证时钟盘面显示的稳定采用红外对管来实现;为了对旋转起来的电路板供电方便,采用无线供电;为了能够方便地调节旋转时钟的时间,拟采用红外遥控。故该系统的硬件模块主要由以下几部分组成:显示模块、无线供电模块、单片机最小系统模块、红外遥控模块、时钟模块、校准模块、电机驱动模块。其系统原理框图如图2.1所示。其中无线供电模块利用线圈耦合将能量传输给单片机系统,单片机系统就能正常工作了。电机带动单片机系统快速旋转;然后单片机再快速读取时钟模块的时间,并将这些时间信息送给显示模块;显示模块就能根据这些时间信息控制相应的发光二极管亮灭,再配合电机的旋转就能实现时钟的显示了。由于整个时钟是高速旋转的,所以对时间、位置等参数的设置采用红外遥控模块来实现比较方便。时钟模块就是为整个系统提供准确的时间,而校准模块是用来对时钟显示的起点进行检测。
3 单元模块电路分析与设计
3.1 单片机最小系统模块分析与设计
单片机最小系统模块是由单片机芯片(STC12C5A60S2)、时钟晶振电路和复位电路组成。其中复位电路能够实现按键复位和上电即复位的两个功能。时钟晶振电路使用12MHz的晶振,给单片机提供时钟信号。STC12C5A60S2芯片的31脚(/EA端)接高电平,使其从内部的程序存储器读取指令,为了防止31脚意外输出低电平而将单片机烧坏,需要在31脚外接一个10K的电阻。
3.2 无线供电模块分析与设计
无线供电模块由发送模块和接收模块组成。其中无线发送模块主要由三极管B772和9013以及初级线圈等组成。其中B772工作时发热会很厉害,所以要外加散热片。电路主要工作原理是根据法拉第电磁感应定律,先将直流电变成交流电,然后通过初级线圈将能量发送出去,次级线圈最终感应得电,在经过相应的电路从而完成对单片机供电。其中,直流电转交流电部分采用的是一个自激震荡电路。
无线接收模块原理主要如下:首先次级线圈用来接收发送模块的初级线圈发送出来的能量,因为发送模块采用的是直流变交流将能量传送出去,所以次级线圈最总感应到的是交流电,而单片机的供电要求是直流电,所以必须经过整流才能变成直流电,最后再经7805稳压芯片,用来输出稳定的5V电源,用来给单片机供电。
3.3 电机驱动模块分析与设计
电机驱动模块使用的电机是RF370电机,当其工作电压选在5V时它的转速在2500~3100转/分,电流也只需20mA,非常省电,并且转速能满足设计要求,旋转时噪音也小,所以很适合用来完成设计。电机是通过一个2脚插针连接到无线供电发送模块中的,此时5V电源给电机供电。由于电机工作的时候会储存能量,当停止工作的时候就会释放掉,为了避免电机释放的电流可能会烧坏其它电路,故需在电机两端并联一个限流二极管1N4148起保护电路作用。
3.4 时钟模块分析与设计
时钟模块就由时钟芯片DS1302与其外围硬件电路组成。DS1302芯片在2脚和3脚之间接一个32.768KHz的晶振,DS1302芯片内部经过分频就能得到1Hz的标准信号,为时钟提供精准的时间信号。8脚的Vcc1外接3V纽扣电池,当模块断电后,它能让DS1302继续工作来保存时间数据;1 脚的VCC2也是要外接电源5V,当双电源时VCC2作为主电源给模块供电;5脚(/RST)是复位/片选端,用来控制DS1302与外通信,接单片机
旋转时钟 STC12C5A60S2芯片 无线供电 DS1302芯片 红外遥控 相关文章:
- DS1302芯片+1602液晶显示(11-29)
- 给弱势群体的一份关爱,语音识别助老助残服务系统的完整解决方案(06-04)
- 红外通信—红外遥控器NEC解码程序(12-02)
- 通过串口发送红外遥控器的解码值到PC(12-02)
- 单片机红外遥控解码HS0038B用1602液晶显示(12-02)
- 51单片机万能红外遥控解码程序(12-01)