轮式移动机器人的循迹设计
时间:10-15
来源:互联网
点击:
2.3.2 小车运动逻辑
如表1。

3 系统的软件设计
本设计使用Keil软件并采用C语言来编译程序。
软件的烧录:
第一步:安装并运行STC_ISP_V480软件;
第二步:点击MCU Type栏的倒三角选项;选择对应的单片机型号STC89C52RC。
第三步:点击打开程序文件选项选择已经编译好的HEX文件。
第四步:打开设备管理器找出下载端口,选择相应的COM口,点击“点击Download/下载”,对话框出现正在尝试与单片机握手,请上电,再给单片机供电,烧录完成。
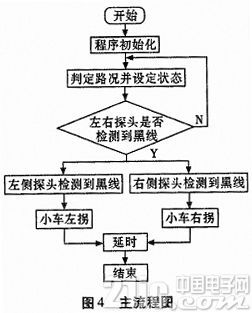
软件设计系统主程序流程图如图4所示。
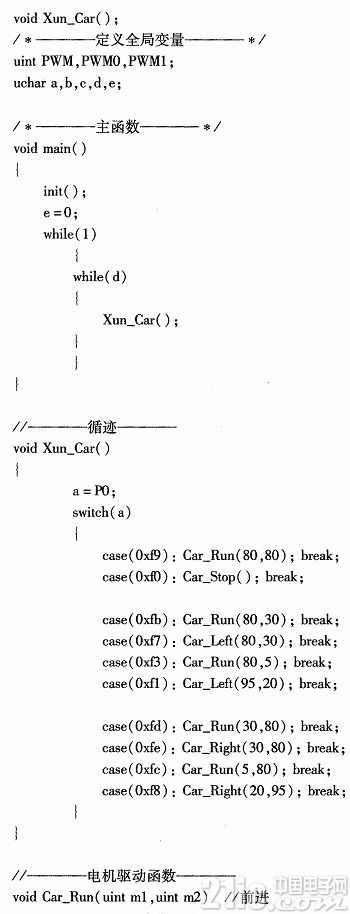
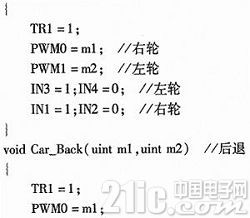
部分系统程序附录如下:

4 结论
本设计的内容主要是智能小车的循迹系统。所设计小车采用四个光电传感器来检测循迹路线,同时对得到的数据进行融合处理。得到了以下成果:
1)小车可以在外部环境无改变时,沿着预先设定的轨道正常循迹。
2)经过数十次的测试证明,当传感器呈M形布局时,易产生不稳定的震荡信号,从而影响小车行驶时的稳定性,但M型布局最适合检测弯道较多的轨迹。因为传感器M形布局时,他们不在同一直线上,这样的话小车在转弯时,左右两边后部的传感器就会有较大的采样空间,两边前端的传感器则对采集的信号有更好的前瞻性。整个布局有利于在弯道处提高小车速度。
3)小车保留了扩展功能。小车在完成预计功能前提下,预留部分软件和硬件接口,保留一定扩展功能。
- FPGA的DSP性能揭秘(06-16)
- 基于单片机通用引脚的软件UART设计(10-16)
- 分时操作系统思想在单片机中的具体应用 (10-30)
- 基于AT89C51+DSP的双CPU伺服运动控制器的研究(05-26)
- 关于RTX51 TINY的分析与探讨(05-30)
- 基于MC9S12DGl28单片机的智能寻迹车设计(04-03)