电感传感器金属探测定位系统设计
控制器以及其他模块供电。
(2)传感器的选择
本文选择了OMROM反射式红外光电开关,感应距离为1~50 cm(可调),感应方式为漫反射(非透明物),工作电压为DC 4.5~5.5 V,工作电流为50 mA,输出方式为NPN常开,响应时间为2ms。用来检测直线电机伸出的长度,这样可以随意设置直线电机运动的位置范围,以达到快速定位的目的。
(3)电机的选择
通过比较各种电机的性能,选用了两种电机:一种是57步进电机,另一种是38直流电机。57步进电机具有高耐压性,可达到500 V,同时径向跳动最大0.02 mm(450g负载),轴向跳动最大0.08 mm(450g负载),步距精度可达5%。38直流电机出轴直径为5 mm,电机直径为38mm,电机长度为67 mm,转速可高达4 000转。因此,将它们结合使用既可以满足速度要求,又可以满足精度要求。
由于LDC1000与K60控制器之间的通信是通过SPI通信协议进行传输的,因此需要将LDC1000上与SPI通信相关的4个端口SCLK、CS、 SDI、SDO与K60微控制器上的四个端口D0、D1、D2、D3相连接。D0口输出一定频率的高低电平来模拟时钟信号,D1口输出高电平,使能 LDC1000的SPI通信模块,SDI、SDO与D2、D3进行数据交换,完成数据通信,使得K60控制器能够进行后续的数据处理。
系统需要有较好的人机交互功能,因此在外围电路中采用4×4矩阵按键和Nokia5110LCD液晶显示屏与K60微控制器的通用I/O口相连接,采用 4×4矩阵按键可以只通过8个I/O口达到对16个按键进行识别,相对于普通按键,节省了一半的I/O口资源。在液晶屏的选择上,由于系统需要显示的字符并不多,Nokia5110 LCD液晶屏完全能够满足系统的要求,同时具有价格便宜的优势。
在系统中,金属探测仪需要实现一定范围内的自动探测功能,因此选择在X轴上通过步进电机来进行横向的移动,以达到精确度高这一要求。在达到高精确度要求的同时需要具有较快的速度,因此在Y轴上选用直线电机来进行纵向移动,两者相结合可以进行一定范围内的面扫描。
对于步进电机的控制,K60微控制器通过C1口以及E1口与步进电机驱动模块相连接,E1口输出高低电平控制步进电机移动的方向,C1口输出PWM波控制步进电机移动的速度与距离,最终步进电机驱动模块通过A、B双相输出相应的电压驱动步进电机移动。
对于直线电机的控制,K60微控制器通过B0、B1、B2三个端口与电机驱动模块相连接,该电机驱动模块选择的是简单的H桥驱动,可以通过改变PWM来实现直线电机的转速大小与方向。同时为了能够精确地检测以及控制直线电机移动的距离,系统通过红外传感器模块进行检测,同时信号通过A16端口输入到K60 微控制器中去。
K60微控制器的E0、E2口连接LED以及语音报警系统,在检测到金属时,K60微控制器通过在E0和E2口输出高电平,驱动LED发光的同时语音报警系统发出提示音。
3 金属探测定位系统的软件设计
软件流程图如图5所示。
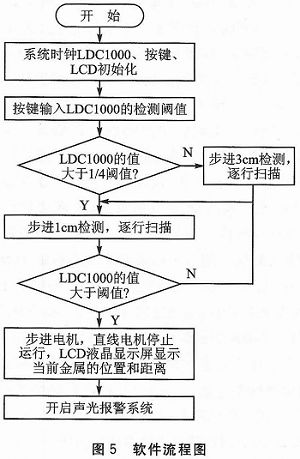
软件设计的关键是控制X轴步进电机的步进长度和Y轴直线电机的移动范围,以及控制LCD液晶显示屏显示当前探测到的金属位置和距离。软件的初始化包括系统时钟初始化、传感器LDC1000初始化、液晶显示屏LCD初始化以及PWM波初始化。主程序开始时,先要通过键盘输入一个阈值,该阈值与要检测的金属性质有关,检测不同金属会输入不同的阈值。当输入完阈值后,控制器会读取LDC1000传来的数据,比较该数据和阈值的关系。
如果该数据小于阈值的1/4,则步进长度控制为3cm;如果该数据大于阈值的1/4,则步进长度控制为1 cm。对于直线电机的移动范围控制是通过反射式红外光电开关来实现的,在直线电机上会有初始位置、终止位置两个黑色标记。若红外光电开关照射到这两个黑色标记,则会输出高电平到I/O口,当控制器的I/O口判断当前的电平为高电平时,就会改变直线机电驱动电压的极性,从而实现电机的反向、正向来回运行。 LDC1000传来的数据在0.9~1.1阈值范围内时,表示当前LDC1000传感器已经探测到金属了,步进电机和直线电机将停止运行。液晶显示屏将显示当前金属的位置和距离。同时,I/O口E0输出高电平信号,驱动语音模块进行声音报警,I/O口E2输出高电平信号驱动发光二极管发光报警。
4 实验结果与数据
为了检验系统对于检测不同材质和大小的金属物体的精确度,实验选取了1角硬币(直径19 mm,材质为镀镍钢芯)、1元硬币(直径25 mm,材质为镀镍钢芯)和自制铁丝环(直径4 cm,材质为铁)3种金属作为被检测金属物体,放置在50 cm×50 cm范围内任意一处。然后运行金属定位探测系统,对金属物体进行检测以及定位,最后测量系统定位点与金属中心点
金属探测仪 LDC1000 飞思卡尔 微控制器 LCD 相关文章:
- 飞思卡尔采用最新平板设计改进第二代智能本外观(01-06)
- DSP系列为下一代无线基站部署提供更高的性能支持(01-07)
- SoC:IP是新的抽象(10-24)
- 如何采用门控时钟来设计低功耗时序电路(06-23)
- 支持ASIL D 应用的安全集成硬件解决方案(12-20)
- 基于飞思卡尔DZ60的AD 1302 KEY 485 CAN FLASH LCD程序(12-01)