基于单片机的视力保护器设计
为了保护青少年的视力,现如今越来越多的公司都在研发生产各种视力保护产品,国内主要有眼保姆,坐姿矫正器和各种护眼灯;国外有法国艾斯·布鲁斯研发的光明天使博士镜,以及美国眼科专家威廉贝茨研发的阿瞳二代产品。但这些产品功能单一,不能满足消费者的个性化需求。针对这一问题,本文将单片机与视力保护相结合,利用单片机芯片的智能处理功能,结合超声波测距原理,光敏电阻随光强变化的特点,单片机定时器T0,T1的工作原理,以及LCD1602液晶显示器的使用方法,设计了一个多功能视力保护器。该设计的技术要求是当学生的面部与书本或电脑的距离小于30 cm时,蜂鸣器产生声光报警,提醒学生注意坐姿;当学生学习时间超过45分钟时,蜂鸣器产生声光报警,提醒学生休息片刻;当光线过强或过弱时,蜂鸣器产生声光报警,提醒学生注意学习环境;能够分辨是什么原因引起的声光报警;并具有设置功能,能够自行设定相应的数据。
1 总体设计
1.1 系统设计方案
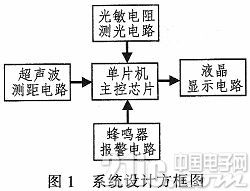
本系统采用STC89C52RC DPIP40单片机作为核心控制单元,通过HC—SR04超声波测距模块测量人的面部到书本的距离,当测得距离小于30 cm或设定距离时产生声光报警。利用光敏电阻的光电导效应采集光线模拟信号,并通过ADC0832模数转换器转换为数字信号,对数字信号进行光强等级处理并用1602液晶显示器显示光的强弱,当光太强或太弱时产生报警。通过单片机内部定时器T1对学习时间进行计时,当学习时间超过45分钟或设定值时产生报警,其中报警电路由一个PNP型三极管驱动。系统总体设计方框图如图1所示。
1.2 系统设计的基本步骤
本设计的主要步骤如下:
1)认真分析视力保护器的技术要求。
2)确定硬件设备,选好器件的型号。
3)画电路原理图。
4)根据硬件电路及各芯片的时序编写程序。
5)将程序输入单片机进行软件测试,查找错误,使系统程序更加完善。
6)根据电路原理图及相应元器件的焊接方法焊接硬件电路。
7)将程序写进单片机进行硬件调试。
2 硬件设计
STC89C52RC PDIP封装单片机由宏晶科技推出,其指令代码完全兼容传统8051单片机,是一种增强型8051单片机。工作电压为5. 5~3.3 V(5 V单片机),有8 K字节的用户应用程序空间,片上集成512字节RAM,内部带2 K EEPROM的存储空间。通过串口就可直接下载程序,且处理速度快,抗干扰能力强,功耗低,价格便宜,所以本设计采用STC89C52RC作为控制电路的主选芯片。
2.1 主控模块设计
该主控模块含有时钟电路、系统复位电路、电源电路。其中时钟电路由单片机内部反相放大器的输入引脚跨接在晶振两端和两个微调电容组成,构成自激励振荡器,用来产生单片机工作时必须的时钟信号。时钟电路中电容选用20 pF,晶振选用12 MHz,因为频率越高单片机的速度越快。系统采用按键复位的工作方式,其复位电路由复位按键、10μF电容和10kΩ电阻组成,单片机的复位时间由复位电路的极性电容决
定,极性电容一般采用10~30μF。单片机的时钟工作以后,只要RST引脚上出现两个机器周期以上的高电平,系统就复位。
2.2 蜂鸣器报警电路模块设计
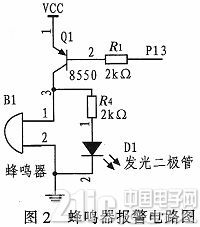
由于电磁式蜂鸣器需要较低的电压就能发出很高分贝的声音,本设计选用电磁式蜂鸣器,其发声的原理为电流通过电磁线圈产生磁场,进而驱动振动膜片发声。由于单片机I/O引脚输出电流的驱动能力有限,所以采用PNP型三极管(放大作用)驱动蜂鸣器。当P1.3输出高电平“1”时,三极管Q1截止,没有电流流过线圈,蜂鸣器不发声,当P1.3输出低电平“0”时,三极管Q1导通,电流流过蜂鸣器线圈,蜂鸣器发声。因为发光二极管和蜂鸣器并联,所以声光报警是同时进行的。蜂鸣器报警电路图如图2所示。
2.3 光敏电阻测光电路模块设计
2.3. 1 光敏电阻
光敏电阻采用硅,锗,硫化镉,硒化铅等半导体材料制成,它的工作区在一个很薄的光敏层上,光敏层具有电阻特性,两端由金属电极引出。无光照时,光敏电阻的阻值很大,当光线照到光敏层上,半导体材料中的载流子将迅速增加,阻值下降,光线越强,阻值越低。光敏电阻通常做成片状结构,以便吸收更多光能。光敏电阻具有灵敏度高,测光范围广的优点。光敏电阻属于有源器件,工作时必须加电源。
2.3.2 光敏电阻测光电路
光敏电阻测光电路工作原理:当光线发生变化时,由于光敏电阻内部载流子发生变化,所以流过光敏电阻的电流发生变化,进而R6两端的分压产生变化,该模拟电压信号经过ADC0832模数转换器采集后便可得到相应的数字信号,再经过单片机处理后,在LCD液晶模块上显示光的强弱百分比。光敏电阻测光电路
- FPGA的DSP性能揭秘(06-16)
- 基于单片机通用引脚的软件UART设计(10-16)
- 分时操作系统思想在单片机中的具体应用 (10-30)
- 基于AT89C51+DSP的双CPU伺服运动控制器的研究(05-26)
- 关于RTX51 TINY的分析与探讨(05-30)
- 基于MC9S12DGl28单片机的智能寻迹车设计(04-03)