嵌入式系统的自适应前照灯系统设计
MCP2510发送复位指令使它复位,然后使其进入Configuration模式进而对它进行初始化,即对各个相应的寄存器赋初始值,设定MCP2510的波特率、发送标识符、接收标识符、报文验收滤波器及屏蔽寄存器,完成初始化后将其置为Normal模式,进入等待接收数据状态。
电机驱动模块电路程序的设计主要有三部分:两个循环加减计数器、两个ROM IP核和4路复用D/A转换器的片选信号发生单元。ROM是用ISE提供的IP核来实现,对24MHz系统时钟进行分频得到D/A转换器的片选信号,然后对4个端口进行扫描,就可以达到分时复用的目的。
汽车前照灯转向控制中心主要对各汽车传感器信号进行接收,并根据汽车自适应前照灯的原理实现它的相关控制算法,然后发送控制信号给汽车前照灯转向控制器,使它控制前照灯实现智能转向。
在汽车中,汽车速度V和安全停车视距S的数学关系如表1所列。

根据表中的数据,得到汽车速度与停车视距间的拟合数学关系如下:
S=0.0015V3+0.21V2+0.6821V+10.0122 (1)
当汽车转弯时,汽车前照灯转向控制中心根据汽车转弯半径和速度计算出前照灯的转动角度。然后汽车前照灯转向控制器通过控制步进电机来执行前照灯的转向。停车视距与转弯半径的几何关系图如图5所示。
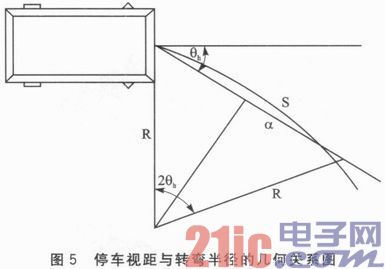
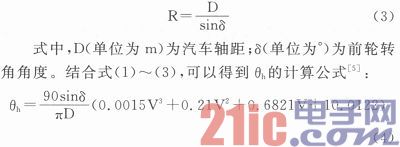
图5中,R(单位为m)是汽车转弯半径;θh(单位为度)是前照灯的水平方向转动角度;S(单位为m)是停车视距。停车视距的计算公式为:
![]()
在实际情况下,转弯半径不容易获取,所以通常通过汽车前轮转向角度来代替汽车转弯半径。根据阿克曼几何转向原理,汽车前轮转角与转弯半径的关系如下:
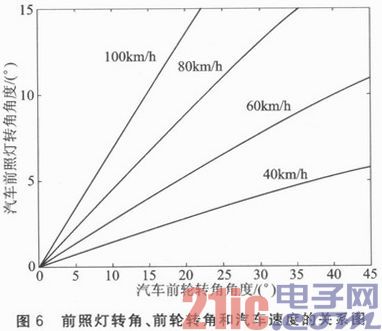
假设汽车的轴距为2.812 m,得到如图6所示的前照灯转角角度、前轮转角角度和汽车速度的关系图。
4 系统测试
测试中汽车前照灯转向控制中心通过收集汽车速度和方向盘转角传感器信号计算出前照灯转角角度,然后向汽车前照灯转向控制器发送控制信号。由于汽车前照灯要求转动的角度较小,最大转动角度只有15°,所以很容易达到响应速度的要求。测试表明,前照灯转角角度误差较小,满足系统要求。
步进电机 FPGA MCP2510 LMD18245 相关文章:
- DSP和PBL3717A构成的步进电机的控制系统(04-01)
- 基于TMS320F240控制步进电机的调焦系统设计(10-20)
- 基于嵌入式Linux的步进电机驱动程序设计(08-08)
- 基于TMS320F240的步进电机的调焦系统设计(03-10)
- DMC130A控制器在双液定量灌注机系统中的应用(06-06)
- 步进电机定位控制系统的VHDL程序设计(06-05)