寻轨式语音播报送餐机器人系统的软硬件设计
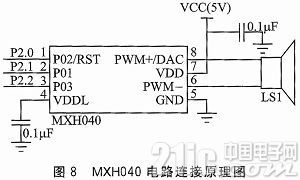
下几个语句:“您好,服务员正在送餐中。请让一下路”,“您好,您的点餐已到,请慢慢享用”,“拜拜”,“您好,送餐已经回来,请准备下一次送餐”。硬件电路如图8所示。
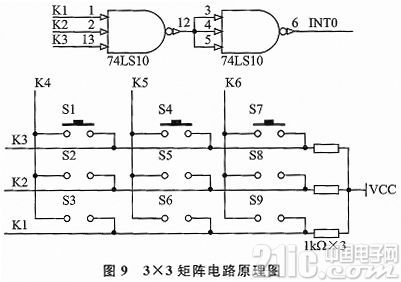
2. 7 3×3按键矩阵
按键矩阵采用3x 3矩阵方式,通过两个三输入的与非门单片机中断口连接,电路原理图如图9所示。
3 软件设计
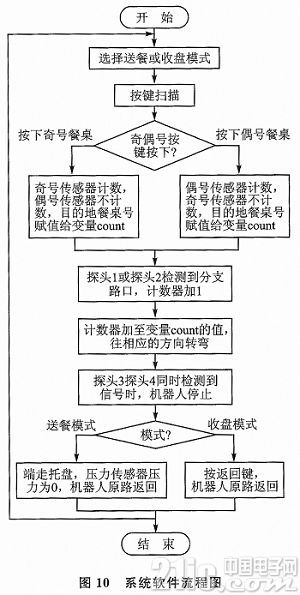
启动后,选择送餐或收盘模式,系统进入按键扫描状态,当服务员放好点餐端盘后,按下目的地餐桌号,系统若检测到奇数餐桌号,则启动奇数餐桌号计数器并禁止偶数餐桌号计数器;若检测到偶数餐桌号,则启动偶数餐桌号计数器并禁止偶餐桌号计数器,并把目的地餐桌号赋值给变量count,机器人开始寻轨行走。当探头1或2检测到分支路口时,计数器加1,直至计数器加至变量count的值,机器人才向相应的方向转弯行走。当探头3或4同时检测到信号时,机器人停止行走,若是“送餐”模式,则客人取走端盘,系统等待10 s后原路返回。若是收盘模式,则按返回键,机器人原路返回。软件流程图如图10所示。
3.1 红外寻轨
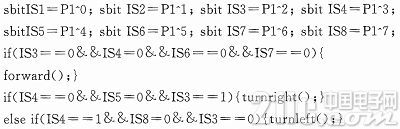
3、4、6、7为红外寻轨探头,探头5、8用来修正轨道。红外反射外传感器端口定义与寻轨程序设计如下:
3.2 步进电机驱动
步进电机作为机器人的动力,主要通过单片机产生的PWM脉冲来调速。LMD18200逻辑真值表如表1所列。
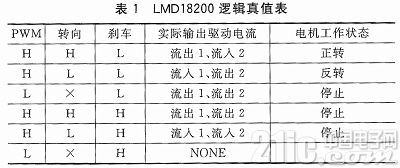
因为使用4个驱动步进电机,需要两个LMD18200模块,步进电机使能端位定义、左转、右转、前进、停止子程序设计略——编者注。
3.3 按键扫描程序设计
按键使用3×3矩阵中断扫描,S1~S8分别对应1号~8号餐桌的路径,S9为备用返回键。单片机的P1口用于键盘的连接,键盘中的行、列线分别连接到按键开关的两端,通过键盘处理程序确定有无按键按下,判断哪一个按键按下,还要消除按键在闭合或断开时的抖动。两个并行口中,一个使按键逐行动态接地,另一个并行口输入按键状态,以此确定闭合键的位置。程序设计如下:
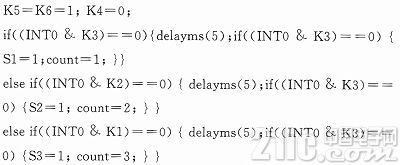
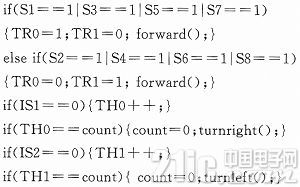
3.4 奇偶餐桌号计数
使用STC12C5A60S2单片机里的两个计数器:T0、T1。其中,T0用来计奇号数餐桌号,T1用来计偶号数餐桌号。当按下奇号数餐桌号时,T0开始工作,T1禁止计数。当送餐机器人走到1号餐桌分支路口时,TCRT5000传感器的红外发射二极管不断发射红外线,并被黑线轨迹吸收,发射出的红外线没有被反射回来,这时计数器自动加1,直至加到与工作人员按下的按键号count值一致时,送餐机器人才向奇数餐桌侧转弯,并前行到该号餐桌。
当红外探头3、4检测到有信号时,小车停止。同样,当按下偶数餐桌号时,T1开始工作,T0禁止计数。程序设计如下:
结语
根据程序测试,选择模式后,按下按键,寻轨式语音播报送餐机器人能够沿着黑线行走,遇到前方有人时,机器人停止行走并语音提示前方行人让路;遇到奇偶餐桌号时,可自动识别并计数,直至行走到按键按下的餐桌号;达到目的地后,机器人停止,语音提示客人点餐已到,待客人拿走端盘,托盘压力传感器压力为0,触发主控器10 s倒计时,倒计时结束后机器人原路返回,若是“收盘模式”,则按返回键机器人原路返回。通过测试,寻轨式语音播报送餐机器人的设计实现了预期的功能。
寻轨 语音播报 机器人 STC12C5A60S2 相关文章:
- 基于语言表达障碍者的藏文语音辅助系统的设计(03-27)
- 语音播报超声波测距程序(11-25)
- 基于语音芯片和AT89S52单片机的语音播报记事器设计(11-22)
- 基于ISD4004语音芯片和AT89S52单片机的语音播报记(09-08)
- 基于DSP的机器人视觉伺服系统研究(04-17)
- 基于DSP的自动避障小车(04-05)