数字微流控生物芯片的电极管脚控制信号处理
列进行比对,找到相互兼容的驱动序列,其可由同一个控制引脚来控制。
步骤4 每个分区比对完成后,查看产生的共用引脚数量是否小于x,若小于x则与其他分区中小于x的相比较,直到最终的共用引脚数量等于x或者是没有与其互相兼容的为止。例如:当x=3时,将由图4产生的电极驱动序列以6来进行分区,然后对于每个分区进行比对,会得到在前6个电极中E1=E3=E5,E2=E4=E6由于共用电极数等于3,则无需再与其他电极相比较。
表2是对图4的液滴路由产生的电极驱动序列进行x值的设定,然后分区产生的结果。
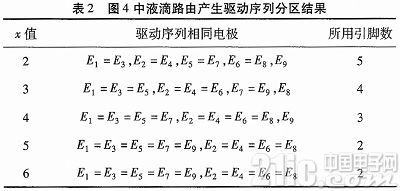
由表2中的数值可体现出,不同x值最终所减少的控制引脚数是不同的,根据x值的设定可更好的对产生的电极驱动序列进行分区,x值不仅对本身的生物芯片的性能有影响,也对最终控制引脚数的减少有一定的影响。文中的实验结果是对x取不同值最终产生的引脚分配进行比对,用最终产生的最优引脚数与其余方法相比对。由于本方法的应用是基于液滴路由路径已知的情况,故最终的阵列完成时问与直接寻址生物芯片的完成时间相同,确保了测试的完成时间。
3 实验结果
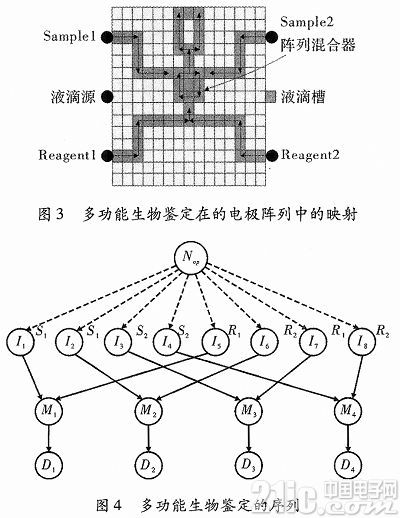
本文将所提出的优化方法引用到生物芯片的多功能生物鉴定当中,来验证方法的有效性。图3所示,多功能的生物鉴定映射到了一个15×15的数字微流控生物芯片上。对于每个样本和试剂均有两个液滴分发到阵列中,因此根据多功能生物鉴定的序列图所示:有4对液滴{S1,R1},{S1,R2},{S2,R1}和{S2,R2}执行到一起进行混合操作,最终进行4组检测操作。
根据上述8个液滴的路由过程,产生电极驱动序列后,图5所示为x分别取x=9,x=10,x=11,x=12再对序列进行分区,最终不同x值产生的引脚分配也不同。
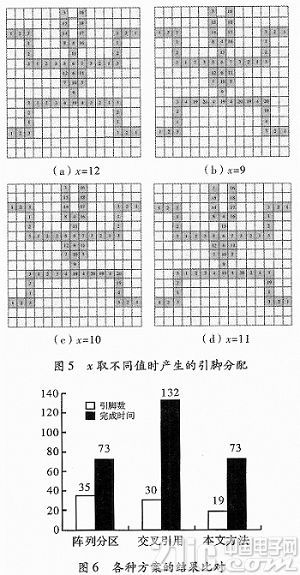
如图5(a)所示,当x=12时最终引脚减少到了19个,相当于68%的减少率。图6是各种方案的比对结果,由图可看出在文献中提出的阵列分区方法最终用到了35个控制引脚,73 s的完成时间;在文献中提出的交叉引用方法,最终减少到了30个控制引脚,132s的完成时间。由上述结果可知,最终减少的控制引脚比其他方法多,在保证测试时间的情况下,达到了更好的结果,且实现了对引脚控制信号的优化处理。
4 结束语
本文主要研究了数字微流控生物芯片的电极管脚控制信号处理,考虑生物芯片有其一定的物理性质,每个控制引脚均会有一定的驱动能力,在此假设每个控制引脚最多能驱动x个电极,然后以x的倍数对产生的电极驱动序列进行分区,再寻找相互兼容的驱动序列,不同的x值最后产生的引脚分配也不同,在文中将x=12时的实验结果与交叉引用等方法相比较,实验结果表明,在确保测试完成时间的情况下,最终所用到的控制引脚比其他方法少,实现了对数字微流控生物芯片的电极管脚的控制信号处理,减少了芯片的制造成本,为未来数字微流控生物芯片的研究提供了参考。
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)