基于CAN和WSN的煤矿语音通信系统设计
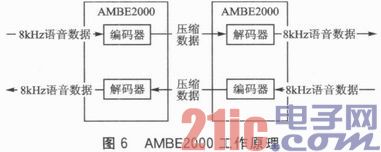
送出去。当没有声音信号输入时,它能够检测到静音并写入标志位。在解码器部分,当它检测到丢失一帧语音数据时,它能够依据上一帧数据尽量真实地预测下一帧语音数据,给出适当的语音信号,本系统选用AMBE2000的编码速率为2.4 kbps。AMBE2000的工作原理如图6所示。
2.3 CAN通信模块
CC2530没有集成CAN控制器,本设计选用了带有SPI接口的独立CAN控制器MCP2515,可方便与CC2530连接。本设计选用的是周立功公司的集成光耦、DC/DC隔离CAN收发器的CTM8251,该收发器具有DC 2500 V的隔离功能。CAN通信模块的电路如图7所示。
3 系统软件设计
系统的软件设计采用模块化设计方法,系统的工作流程为:
①模块初始化。模块初始化主要包括CC2530初始化、引脚初始化、无线模块初始化、CAN模块初始化、AMBE2000初始化等。
②正常工作模式。正常工作模式下采用的是CAN通信,因此无线模块处于休眠状态。系统检测通信按钮是否按下,当按钮按下时,启动语音处理及编解码模块,并通过CAN模块发送出去。当CAN模块接收到总线数据时,产生中断,CAN模块接收数据并送到语音处理模块进行解码。
③紧急状况模式。当系统出现异常情况时,会导致电源中断,通信电缆被切断,甚至有些节点遭到损坏无法正常工作。语音节点的无线模块启动,自动进行组网,改为通过无线来传输语音信号。同时在节点遭到损坏的区域,人工布置传感器节点,这些节点与语音节点自组织组网,形成新的无线传感器网络,来恢复和保障语音通信。
由于语音通信对系统的实时性要求比较高,而对传输过程中短暂的丢包和错误具有较高的容错率,因此传统的可靠传输控制协议并不完全适用于语音通信系统。本设计中,采用了一次握手,多个数据连续通信的不可靠数据报文传输机制,来保证语音通信的实时性。
4 系统测试
为了验证系统的语音通信性能,特别是无线语音通信性能,对系统进行了定量和定性两种试验测试。试验设备由语音节点、电源模块、信号发生器、声级计、扫频仪等组成。
4.1 定量试验一
系统试验方法为:两个节点通过无线传输,其中1号节点通过信号发生器输入不同幅值的1 kHz的正弦信号,通过分贝计在2号节点的喇叭正前方1 m处测试语音声强。测试连接示意图如图8所示。
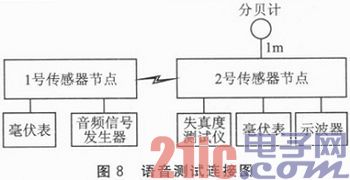
经测试,语音声强可达到85dB,语音失真度小于15%。调节音频信号发生器,使信号频率从350~3 000 Hz变化,测得频响优于±6dB。
4.2 定量试验二
经过定量试验后,再对系统的语音质量进行定性测试。测试方法为:将接收节点固定,对发送节点距离不同情况下的语音音质、语音流畅度的情况进行定性判断。具体测试情况如表1所列。

经过测试,当节点距离在20 m内时,语音流畅、音质较好;在25 m内时开始出现颤音,但仍能满足语音通信的要求;在30 m时,语音质量开始下降;40 m时音质较差,无法满足语音通信要求。因此语音节点布置距离应保证在25 m以内,条件允许时应尽量保证在20 m内为宜。
结语
本文设计的井下语音通信系统,充分结合了有线通信和无线通信的优点,正常情况下采用CAN通信来传输语音信号,保证系统的稳定性和可靠性。紧急情况下采用无线通信来传输语音信号,并且能够通过人工布点的方式接续被破坏的节点,保障紧急情况下的语音通信。通过实验证明了系统声强、失真度、频响等性能指标均符合现场使用的要求,且现场布置时节点间距离以不大于25 m为宜。
语音通信 CC2530 无线通信 CAN通信 AMBE2000 相关文章:
- 嵌入式语音通信系统中VxWorks BSP的设计实现(09-18)
- 语音通信保密系统设计(05-16)
- CC2530串口接收发送数据(11-09)
- 基于ZigBee的高校宿舍防火防盗监控系统设计(10-22)
- 基于STM32F107的图像采集传输系统设计(10-15)
- 基于Zigbee的船舶状态监控系统的设计与实现(09-12)