STM32 TImer几种模式_通用定时器
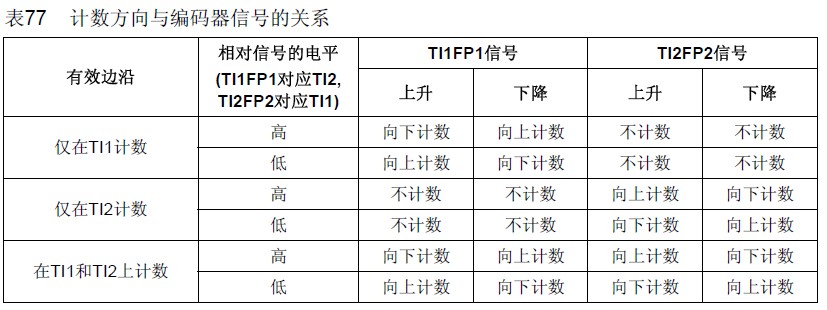
两个输入TI1和TI2被用来作为增量编码器的接口。参看表77,假定计数器已经启动(TIMx_CR1寄存器中的CEN=’1’),计数器由每次在TI1FP1或TI2FP2上的有效跳变驱动。TI1FP1和TI2FP2是TI1和TI2在通过输入滤波器和极性控制后的信号;如果没有滤波和变相,则TI1FP1=TI1,TI2FP2=TI2。根据两个输入信号的跳变顺序,产生了计数脉冲和方向信号。依据两个输入信号的跳变顺序,计数器向上或向下计数,同时硬件对TIMx_CR1寄存器的DIR位进行相应的设置。不管计数器是依靠TI1计数、依靠TI2计数或者同时依靠TI1和TI2计数。在任一输入端(TI1或者TI2)的跳变都会重新计算DIR位。 编码器接口模式基本上相当于使用了一个带有方向选择的外部时钟。这意味着计数器只在0到TIMx_ARR寄存器的自动装载值之间连续计数(根据方向,或是0到ARR计数,或是ARR到0计数)。所以在开始计数之前必须配置TIMx_ARR;同样,捕获器、比较器、预分频器、触发输出特性等仍工作如常。 在这个模式下,计数器依照增量编码器的速度和方向被自动的修改,因此计数器的内容始终指示着编码器的位置。计数方向与相连的传感器旋转的方向对应。下表列出了所有可能的组合,假设TI1和TI2不同时变换。
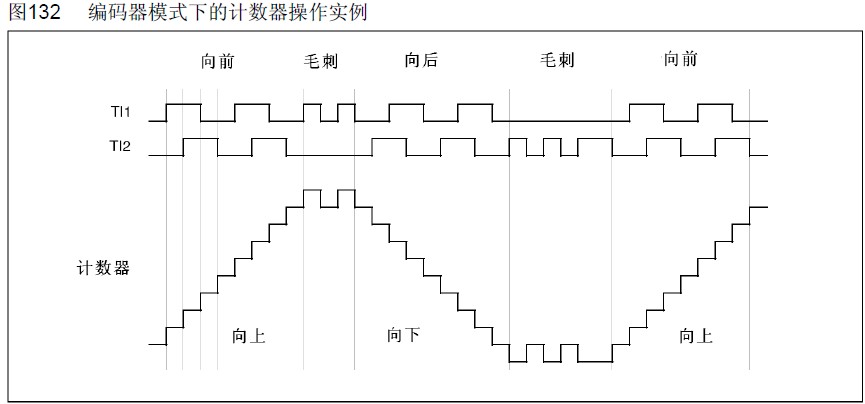
下图是一个计数器操作的实例,显示了计数信号的产生和方向控制。它还显示了当选择了双边沿时,输入抖动是如何被抑制的;抖动可能会在传感器的位置靠近一个转换点时产生。在这个例子中,我们假定配置如下:
● CC1S=’01’ (TIMx_CCMR1寄存器,IC1FP1映射到TI1)
● CC2S=’01’ (TIMx_CCMR2寄存器,IC2FP2映射到TI2)
● CC1P=’0’ (TIMx_CCER寄存器,IC1FP1不反相,IC1FP1=TI1)
● CC2P=’0’ (TIMx_CCER寄存器,IC2FP2不反相,IC2FP2=TI2)
● SMS=’011’ (TIMx_SMCR寄存器,所有的输入均在上升沿和下降沿有效).
● CEN=’1’ (TIMx_CR1寄存器,计数器使能)
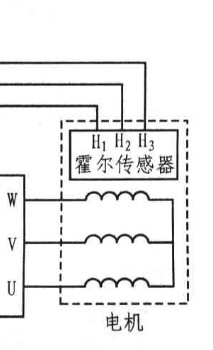
TIM 与Hall接口

霍尔传感器位于三相电机
STM32TImer模式通用定时 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)