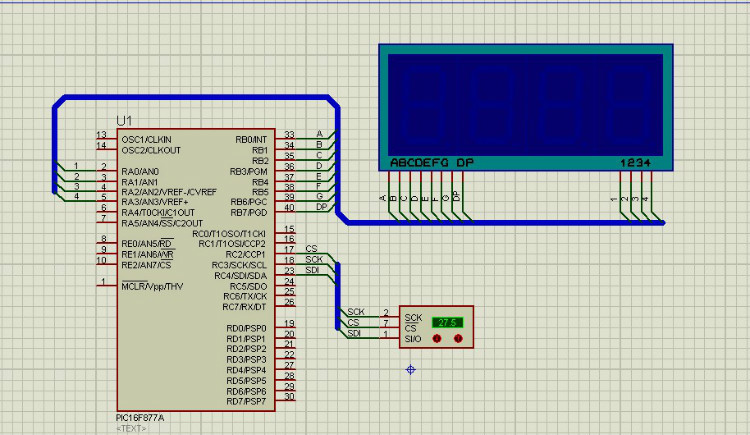
PIC16F877A-SPI-TC77ЃЈЮТЖШДЋИаЦїЃЉ
TC77ЃКЗжБцТЪ0.0625Ёц
#include
#define CS RC2
void initPORT();
void initMSSP();
void delay(unsigned char time);
void display(float data);
float ReadTC77();
const unsigned char disp[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};
void main()
{
float temp;
initPORT();
initMSSP();
while(1)
{
temp=ReadTC77();
display(temp);
}
}
/*ГѕЪМЛЏPICЕЅЦЌЛњЖЫПк*/
void initPORT()
{
TRISB=0x00; //ПижЦЖЮбЁ
PORTB=0x00;
TRISC=0xf0; //гыЮТЖШДЋИаЦїСЌНг
PORTC=0x00;
TRISA=0x00; //ПижЦЮЛбЁ
PORTA=0xff;
}
/*ГѕЪМЛЏMSSPФЃПщЕФSPIФЃЪН*/
void initMSSP()
{
SSPSTAT=0x00;
SSPCON=0x30;
SSPIF=0;
}
/*ЖСШЁЮТЖШДЋИаЦїЕФ13ЮЛЪ§жЕВЂЧвзЊЛЛГЩИЁЕуРраЭ*/
float ReadTC77()
{
float result,PowerTwo=1;
unsigned char count,HighByte,LowByte;
CS=0;
SSPBUF=0;
while(!SSPIF){}
HighByte=SSPBUF; //ЛёШЁЮТЖШМФДцЦїЕФИпзжНк
SSPIF=0;
SSPBUF=0;
while(!SSPIF){}
LowByte=SSPBUF; //ЛёШЁЮТЖШМФДцЦїЕФЕЭзжНк
SSPIF=0;
CS=1;
for(count=0;count<8;count++) //зЊЛЛећЪ§ВПЗж
{
PowerTwo*=2;
if(HighByte&(0x01 } PowerTwo=1; for(count=0;count<5;count++) //зЊЛЛИіЮЛМАаЁЪ§ВПЗж { if(LowByte&(0x80>>count)) result+=PowerTwo; PowerTwo=PowerTwo/2.; //зЂвтЃЌВЛФмЛЛГЩ.2ЃЌЗёдђЛсГіДэ } return result; //ЗЕЛизЊЛЛИЁЕуНсЙћ } /*вКОЇЯдЪО*/ void display(float data) { unsigned int conver,First,Second,Third,Fourth; conver=data*100; First=conver/1000; Second=conver/100%10; Third=conver/10%10; Fourth=conver%10; PORTA=0xfe; //ЯдЪОЪЎЮЛ PORTB=disp[First]; delay(2); PORTB=0x00; PORTA=0xfd; //ЯдЪОИіЮЛ PORTB=0x80+disp[Second]; //МгЩЯ0x80МДПЩДјЕу delay(2); PORTB=0x00; PORTA=0xfb; //ЯдЪОЪЎЗжЮЛ PORTB=disp[Third]; delay(2); PORTB=0x00; PORTA=0xf7; //ЯдЪОАйЗжЮЛ PORTB=disp[Fourth]; delay(2); PORTB=0x00; } void delay(unsigned char time) { unsigned char i,j; for(i=time;i>0;i--) for(j=255;j>0;j--); }
PIC16F877ASPITC77ЮТЖШДЋИа ЯрЙиЮФеТЃК
- Windows CE НјГЬЁЂЯпГЬКЭФкДцЙмРэ(11-09)
- RedHatLinuxаТЪжШыУХНЬГЬ(5)(11-12)
- uClinuxНщЩм(11-09)
- openwebmailV1.60АВзАНЬбЇ(11-12)
- LinuxЧЖШыЪНЯЕЭГПЊЗЂЦНЬЈбЁаЭЬНЬж(11-09)
- Windows CE НјГЬЁЂЯпГЬКЭФкДцЙмРэ(Жў)(11-09)