基于RS-485协议设计智能数据采集网络仪表
在由以单片机为核心构成的仪器仪表、智能设备等诸多数据采集系统中,往往需要实现计算机与单片机之间的数据交换,这也就是单片机与计算机之间的通信,以此来充分发挥单片机与计算机各自的长处,提升整个应用系统性能及性价比。传统的基于RS-232协议的通信由于传输距离短、速度慢、信号易受干扰等不足,使得其应用局限性日益突出。有鉴于此,作者在文中讨论了如何基于RS-485通信协议,构建RS-485通信网络,实现若干单片机与计算机之间远程通信。
二、硬件设计
1.RS-485通信简介
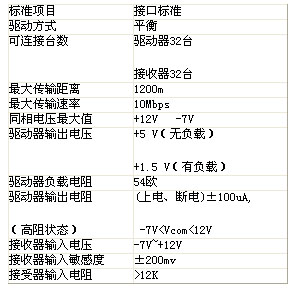
RS-485是EIA(美国电子工业协会)制定的平衡发送、平衡接收的标准异步串行总线,它具有传输距离远、灵敏度高、多点通信能力强等优点。RS-485接口标准参见表一。
2.MAX485芯片介绍
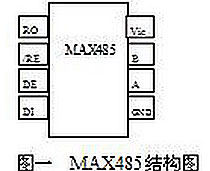
RS-485转换接口芯片我们采用MAXIM公司的MAX485(见图一),该芯片采用单电源+5V工作,额定电流300uA,半双工通信方式,它完成将TTL电平转换成
RS-485电平。该芯片具有8条引脚,内部含2个驱动器和接收器,RO,DI分别为接收器的输出端和驱动器的输入端,二者分别接单片机TXD和RXD。/RE和DE分别为接收和发送使能端,当/RE=0时,MAX485处于接收状态;当DE=1时,MAX485处于发送状态。因为MAX485工作在半双工状态,所以它与单片机连接时接线非常简单,只需用单片机一个管脚控制这两个引脚即可。A端和B端分别为接收和发送的差分信号端,当VA大于VB时,表示发送数据为“1”,当VA小于VB时,表示发送数据为“0”,工作时,A、B之间应加匹配电阻,一般可选100~120欧。
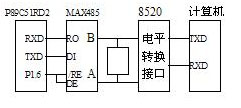
.电平转换接口
在PHILIPSP89C51RD2单片机与计算机进行通信时,必须对电平作一转换。因为单片机与计算机之间是RS-485网络,单片机侧信号经MAX485后,从TTL电平转换为RS-485电平信号,因此,在计算机侧必须再把RS-485信号转换成RS-232电平信号,这样,二者才能正确通信。在本系统采用DAC-8520转换器,把RS485信号转换为RS-232信号,该转换器数据转换传输速度快,且不需要用户对其进行初始化和参数修改。
表一RS-485接口标准
4.计算机端接口
计算机采用可编程串行异步通信控制器8251A来实现,通过对8251A初始化可以控制串行数据传送格式和速度及其工作方式,使得它与单片机的通信方式一致,从而实现计算机与单片机之间的通信。
三、多点通信
3.1多点通信原理
RS485总线标准是在RS-422基础上发展起来的,它增加了多点双向通信能力,使分布式网络的多点通信得以实现。我们在了解了器件的驱动能力后,就可以根据需要和驱动能力加入需要的节点。本系统就是利用一台计算机控制多达32块单片机,计算机通过发送控制字和工作方式字来确定和所需要的单片机建立通信连接。单片机根据计算机发送的指令进行数据采集,并根据需要与计算机交换数据或对生产过程参数及所连设备状态进行调整。计算机对单片机传回的数据进行分析与计算后,再将相关控制信息传给单片机。
51系列单片机用于多点通信时必须工作在方式2或方式3。以方式3为例,每发送一帧数据为11位:1位起始位(0),8位数据位和1位停止位(1),附加的第9位数据在非多点通信系统中为奇偶校验位,在发送端有SCON的TB8产生,在接收端传送到RB8。它还可设定为“0”或“1”作为在多点通信中区分数据帧(0标志)还是地址帧(1标志)的标志。在51系列单片机多点通信系统中有以下通信协议:所有的各从机均处于听命状态,即SM2=1,以便接收主机发送来的地址,当接收到一帧信息的RB8为“1”时,表示主机发送来的是地址信息,所有的从机均发生接收中断,否则中断屏蔽。当一从机进入相应的中断服务程序,把接收到的地址和本机的地址比较,如果符合就令其SM2=0,并向主机发回本机地址以作应答,该从机就与主机连通,准备接收主机发来的命令或数据信息,而其他的未被寻址的从机保持SM2=1并退出各自的中断服务程序。这样,只有SM2=0的从机才能接收到主机发来的数据信息,顺利实现地址帧和数据帧的分离。被寻址的从机在通信完成后重新使SM2=1,并退出中断服务程序,等待下次通信。
3.2多点通信协议
实现计算机和单片机的正常通信,必须正确设置它们两者之间的工作方式,保证双方都用相同的波特率、起始位、停止位、奇偶校验位,并且要建立双方通信的应答信号。
单片机既可以工作在同步移位寄存器方式,也可工作在UART(通用异步收发器)下。串行口的通信方式是由特殊功能寄存器SCON来控制的。其各位定义如下:

SM0,SM1:工作模式设定位;SM2:允许使用方式2、3多机通信控制位;
RS-485协议智能数据采集网络仪 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)