ARM裸机开发bootloader—点亮LED灯
时间:11-19
来源:互联网
点击:
1、编写LED驱动的流程
a、原理图分析
b、芯片手册
c、思维导图
d、编写代码
2、为什么要点亮led
在嵌入式软件(bootloader、kernel)开发初期,由于串口等硬件尚未进行初始化,所以可以用来调试的手段很有限。这时通常运用点亮led作为调试的重要手段。也就是说不断改动led点亮程序的位置,来查看那段代码出现了问题,然后进行针对性的修改。
下面我用6410为例进行点亮led的介绍,其他的如2440和210流程相似。
a、原理图分析
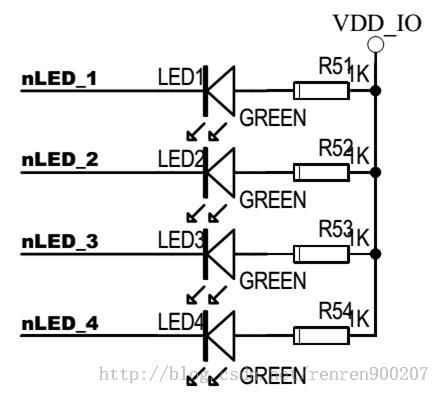

从led的原理图我们可以看到,nLED_*低电平有效,也就是对应的s3c6410GPK4-7低电平,这个时候要引出一个概念:GPIO
什么是GPIO
GPIO(General-Purpose Input/Output Ports):通用的输入/输出端口。在嵌入式系统中,cpu需要控制一些结构简单的外部设备,它们通常只用两种状态(开/关)。如果用串口或USB去控制就显得复杂了些,所以在嵌入式微处理器上就引入了一种“通用可编程I/O端口”,也就是GPIO。
一个GPIO端口至少需要两个寄存器,一个是“控制寄存器”,用于选择端口作为输入还是输出。另一个是存放数据的“数据寄存器”。
b、查看芯片手册
在6410手册上查找GPK端口

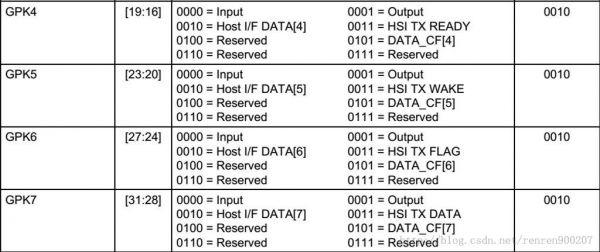

查看到手册我们得知,将相应的数据填入相应的内存地址就可以了。
c、思维导图
总共分为两步来走
1、设置GPIO控制器,把引脚设置为输出
2、根据原理图设置GPIO的数据寄存器
d、编写led的驱动程序
.text.global _start_start:b resetldr pc, _undefined_instructionldr pc, _software_interruptldr pc, _prefetch_abortldr pc, _data_abortldr pc, _not_usedldr pc, _irqldr pc, _fiq_undefined_instruction: .word undefined_instruction_software_interrupt: .word software_interrupt_prefetch_abort: .word prefetch_abort_data_abort: .word data_abort_not_used: .word not_used_irq: .word irq_fiq: .word fiqundefined_instruction:nopsoftware_interrupt:nopprefetch_abort:nopdata_abort:nopnot_used:nopirq:nopfiq:nopreset:bl set_peri_portbl set_svcbl disable_watchdogbl disable_interruptbl disable_mmubl light_ledset_peri_port:ldr r0, =0x70000000orr r0, r0, #0x13mcr p15,0,r0,c15,c2,4mov pc, lr set_svc:mrs r0, cpsrbic r0, r0, #0x1forr r0, r0, #0xd3msr cpsr, r0mov pc, lr#define pWTCON 0x7E004000disable_watchdog:ldr r0, =pWTCON /*mov的操作数最多为8位*/mov r1, #0x0str r1, [r0]mov pc, lrdisable_interrupt:mvn r1, #0x0ldr r0, =0x71200014str r1, [r0]ldr r0, =0x71300014str r1, [r0]mov pc, lrdisable_mmu:mcr p15, 0, r0, c7, c7, 0mrc p15, 0, r0, c1, c0, 0bic r0, r0, #0x00000007mcr p15, 0, r0, c1, c0, 0mov pc, lr#define GPKCON0 0x7f008800#define GPKDAT 0x7f008808light_led:ldr r0, =GPKCON0ldr r1, =0x11110000str r1, [r0]ldr r0, =GPKDATldr r1, =0xa0str r1, [r0]mov pc, lr运行以后,led会两亮两灭。从程序中我们还会看到一个函数set_peri_port。这个函数是对外围设备基地址初始化。原因是arm11的内存与外围接口分开了,这个时候要用此函数把外围寄存器映射到内存中,整个的过程是通过CP15来完成的,也就是告诉CPU外设寄存器的基地址和地址空间实现映射。
set_peri_port:ldr r0, =0x70000000orr r0, r0, #0x13mcr p15, 0, r0, c15, c2, 40x70000000是SROM的基地址,这段代码的功能就是告诉cpu外围设备寄存器基地址为0x70000000,地址空间为256M(0x70000000-0x7fffffff)。
ARM裸机开发bootloader点亮LED 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)