基于单片机的电池安全检测系统设计分析
电子科技迅猛发展,电子产品层出不穷,电池作为主要动力来源,其供电能力与安全可靠性日益受到关注。作为电池研发和生产阶段不可或缺的环节,传统的性能测控人工依赖性高,检测效率低,网络、智能与自动化亦不能满足现实的需求。
本文所提出的已经实现并应用的解决方案能够多路同步全程实时监控电池的测试状态,先完成测试前PC端的监测配置,通过RS485接口和CAN总线实时返回继电器在线连接状态,再根据需求控制与测试项目类型相应继电器的开启。监测开始后,电池电压、电流及温度等信息实时传输到控制室的PC上,可以通过灵活在线编辑的数据曲线反映测试量的变化趋势,同时也可由记录的历史数据查看关键点的情况。
系统功能需求分析
根据现实需求,系统总体需要实现的功能有:
(1)信号采集与控制线路完好性测试:电池测试项目有充电、标称短路、实测短路、过放放电、强制放电和放电保护等,测试前,能将反映实际硬件连接并与测试项目对应控制电路完好性的继电器信号以及测量仪表当前值通过RS485和CAN反馈到PC监控界面上。
(2)测试安全便捷性与自动化:监控界面应有急停按钮,在发生意外时通过控制急停继电器能有效切断测试线路,同时保存当前测试状态以便排除故障后恢复测试。测试前配置电池电压、电流与温度的限值,同时控制测试时间,在遇到突发情况或达到预设目标时自动终止测试。
(3)测试数据记录与处理:由需求确定采样时间间隔,数据以曲线形式实时显示,坐标时间与数据量程可自动动态调整以满足观察趋势需要。数据实时存储选择效率高的二进制文件形式,历史数据导出回放有两可选项:Excel表格与曲线形式。曲线可灵活编辑,如平移、局部放大缩小和多条曲线单显与多显等。另外光标可跟踪曲线移动并动态显示数值。http://www.industryinspection.com
系统硬件设计
如图1所示,由系统功能需求分析知,该电池安全监测系统可分为三部分,分别是数据采集层、数据传输层与位于用户终端PC上的数据处理层。用户通过单片机控制继电器电路来启动预设的测试项目,测量仪表实时显示电池数据,并通过RS485接口由单片机采集,然后采集单片机提取整合有效的电池实时数据经由 CAN总线传输到PC上。电池监测软件实时曲线显示并存储接收到的电池数据,并与相关达标历史数据等进行综合比较,分析电池的可靠安全性。依靠层间通信协议,电池监测系统的层模块化设计提高了系统的可维护性与可扩展性。
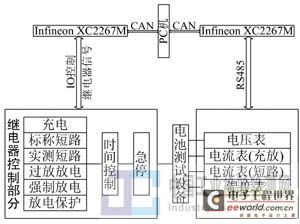
图1 电池安全项目测试系统总体设计框图
本设计选用德国Infineon Technologies公司推出的拥有增强C166SV2架构的XC2267M单片机,集成了电压调节器和多种振荡器,具有超低耗电的待机与操作模式。测量仪表选择上海托克智能仪表有限公司的智能数显表,带有RS485串行通信接口,上下限报警继电器输出(250V/3A),测量频率可达10Hz,可选量程随测量数值动态自动切换。
1 继电器电路控制
根据系统功能能够需求分析,可知对单片机继电器控制板的要求是测试前电池监控电路完好性检验和测试结束或意外发生时及时有效切断电路。
图2为继电器芯片控制电路图,反映实际硬件连接并与测试项目对应控制电路完好性的继电器信号通过4#ST与5#ST经由单片机IO口与CAN总线传输到监控界面上。然而由PC监控端通过CAN总线发出的控制命令转化为单片机输出引脚的高低电平,再经由继电器芯片引脚4#Rly与5#Rly通过引脚 4#Load与5#Load控制继电器开合。
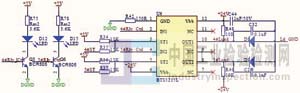
图2 继电器芯片控制电路图
2 数据采集与传输
测量仪表与电池数据采集单片机通过MODBUS/RS485串口进行通信,网络工作方式设置为半双工,通过控制单片机输出引脚的高低电平触发实现,接口采用屏蔽双绞线传输。RS485接口采用平衡驱动器和差分接收器的组合,抗干扰能力强,能实现多站点联网高速率通信,并且接口信号电平低,不易损坏接口电路的芯片。
CAN(Controller Area Network)是一种具有国际标准同时性价比又较高的现场总线,是由德国Bosch公司为分布式系统在强电池干扰环境下可靠工作而开发的,该串行数据通信网络能有效支持分布式控制和实时控制,硬件的错误检定特性增强了其纠错和抗干扰能力,高达1Mb/s的数据传输速率使得实时控制得以轻易实现。CAN总线采用了多主竞争式总线结构,具有多站运行和分散仲裁的串行总线以及广播通信的特点,可在节点之间实现自由通信。
一个典型的CAN节点由带有CAN控制器的MCU和CAN收发器构成。CAN收发器建立CAN控制器与物理总线之间的连接,控制逻辑电平信号在CAN控制器和物理总线的物理层之间的传递。CAN控制器执行CAN协议,用于信息缓冲和滤波。
Infineon XC2267M的MultiCAN模块是根据CAN V2.0B active技术规范设计的,多达6个独立的CAN节点与所有CAN节点共用的256个独立报文对象,CAN节点位时序都来自外设时钟(fCAN),由一对接收和发送引脚将每个CAN节点和总线收发器连接起来,图3为CAN控制器模块概览。
单片机电池安全检测系 相关文章:
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)
- Linux嵌入式系统开发平台选型探讨(11-09)
- Windows CE 进程、线程和内存管理(二)(11-09)